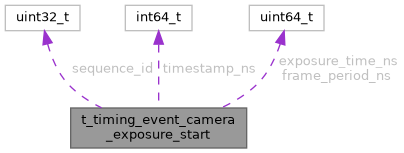
Marks beginning of a camera exposure, pushed from the source to the sink. More...
#include <tracking/t_time_sync.h>
Data Fields | |
| uint32_t | sequence_id |
| The sequence ID of this frame. | |
| int64_t | timestamp_ns |
| The timestamp of the event, in local monotonic domain. See os_monotonic_get_ns. | |
| uint64_t | frame_period_ns |
| Estimated frame period. May be 0 if unknown. | |
| uint64_t | exposure_time_ns |
| Estimated exposure time of the frame. May be 0 if unknown. | |
Detailed Description
Marks beginning of a camera exposure, pushed from the source to the sink.
Field Documentation
◆ exposure_time_ns
| uint64_t t_timing_event_camera_exposure_start::exposure_time_ns |
Estimated exposure time of the frame. May be 0 if unknown.
◆ frame_period_ns
| uint64_t t_timing_event_camera_exposure_start::frame_period_ns |
Estimated frame period. May be 0 if unknown.
◆ sequence_id
| uint32_t t_timing_event_camera_exposure_start::sequence_id |
The sequence ID of this frame.
These may have semantic meaning depending on the source, for example, on a device with a SLAM/CONTROLLER/CONTROLLER cadence, sequence_id % 3 will indicate which type of frame is being exposed.
This is intentionally left as a generic uint32_t, and not an enum to allow for matching source/sync types to smuggle this data through while keeping the interface generic to any sink that wants to listen anyway, since WMR controllers sync to each SLAM frame, and blink on their own for the next two frames.
◆ timestamp_ns
| int64_t t_timing_event_camera_exposure_start::timestamp_ns |
The timestamp of the event, in local monotonic domain. See os_monotonic_get_ns.
The documentation for this struct was generated from the following file:
- tracking/t_time_sync.h