Loading...
Searching...
No Matches
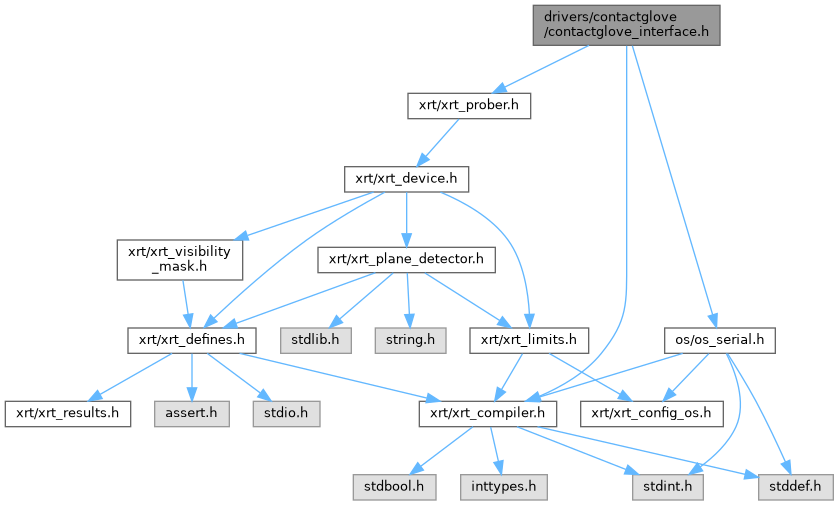
contactglove_interface.h File Reference
Interface to drv_contactglove. More...
Include dependency graph for contactglove_interface.h:
Go to the source code of this file.
Macros | |
| #define | CONTACTGLOVE2_VID 0x10c4 |
| #define | CONTACTGLOVE2_PID 0x6b27 |
| #define | CONTACTGLOVE2_SERIAL_PARAMETERS |
Enumerations | |
| enum | contactglove_type { CONTACTGLOVE_TYPE_CONTACTGLOVE1 , CONTACTGLOVE_TYPE_CONTACTGLOVE2 } |
Functions | |
| int | contactglove2_found (struct xrt_prober *xp, struct xrt_prober_device **devices, size_t device_count, size_t index, cJSON *attached_data, struct xrt_device **out_xdevs) |
| int | contactglove_create (enum contactglove_type type, const char *serial_number, struct os_serial_device *dongle_serial, struct contactglove_dongle **out_dongle, struct xrt_device **out_xdevs) |
| int | contactglove_dongle_pair (struct contactglove_dongle *dongle) |
| Enable pairing mode on the ContactGlove dongle. | |
Detailed Description
Interface to drv_contactglove.
Macro Definition Documentation
◆ CONTACTGLOVE2_SERIAL_PARAMETERS
| #define CONTACTGLOVE2_SERIAL_PARAMETERS |
Value:
XRT_C11_COMPOUND(struct os_serial_parameters) \
{ \
.baud_rate = 115200, .data_bits = 8, .stop_bits = 1, .parity = OS_SERIAL_PARITY_NONE, \
}
Represents the parameters for opening a serial device, such as baud rate, parity, etc.
Definition os_serial.h:54
Function Documentation
◆ contactglove_dongle_pair()
| int contactglove_dongle_pair | ( | struct contactglove_dongle * | dongle | ) |
Enable pairing mode on the ContactGlove dongle.