Loading...
Searching...
No Matches
Autodiff-safe rotations for Levenberg-Marquardt kinematic optimizer. More...
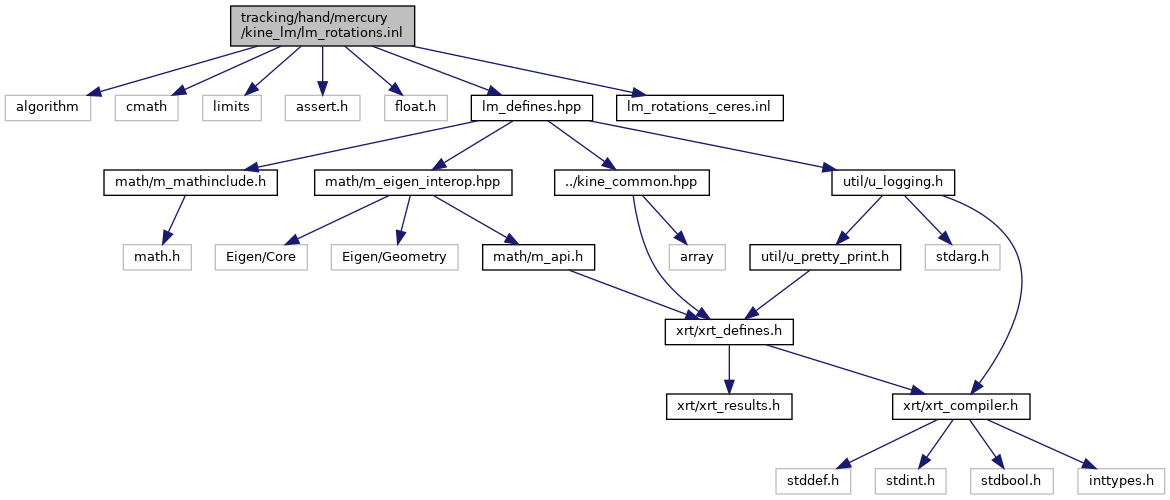
#include <algorithm>#include <cmath>#include <limits>#include "assert.h"#include "float.h"#include "lm_defines.hpp"#include "lm_rotations_ceres.inl"
Include dependency graph for lm_rotations.inl:
Go to the source code of this file.
Macros | |
| #define | likely(x) __builtin_expect((x), 1) |
| #define | unlikely(x) __builtin_expect((x), 0) |
| #define | assert_quat_length_1(q) |
Functions | |
| template<typename T > | |
| void | xrt::tracking::hand::mercury::lm::CurlToQuaternion (const T &curl, Quat< T > &result) |
| template<typename T > | |
| void | xrt::tracking::hand::mercury::lm::SwingToQuaternion (const Vec2< T > swing, Quat< T > &result) |
| template<typename T > | |
| void | xrt::tracking::hand::mercury::lm::SwingTwistToQuaternion (const Vec2< T > swing, const T twist, Quat< T > &result) |
Detailed Description
Autodiff-safe rotations for Levenberg-Marquardt kinematic optimizer.