Loading...
Searching...
No Matches
m_imu_3dof Struct Reference
Collaboration diagram for m_imu_3dof:
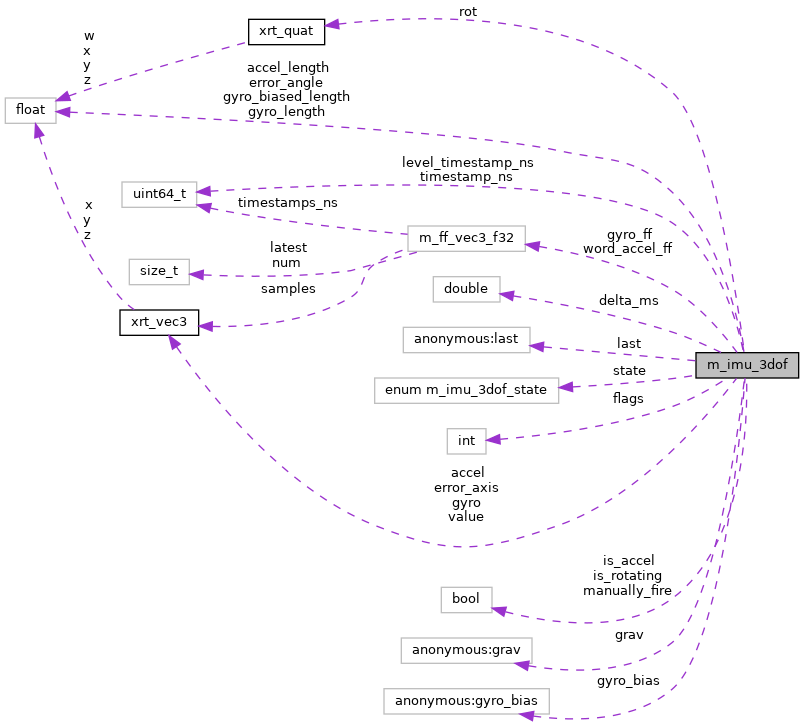
Data Fields | ||
| struct xrt_quat | rot | |
| Orientation. | ||
| struct { | ||
| uint64_t timestamp_ns | ||
| struct xrt_vec3 gyro | ||
| Angular velocity. More... | ||
| struct xrt_vec3 accel | ||
| Acceleration. More... | ||
| double delta_ms | ||
| float accel_length | ||
| float gyro_length | ||
| float gyro_biased_length | ||
| } | last | |
| enum m_imu_3dof_state | state | |
| int | flags | |
| struct m_ff_vec3_f32 * | word_accel_ff | |
| struct m_ff_vec3_f32 * | gyro_ff | |
| struct { | ||
| uint64_t level_timestamp_ns | ||
| struct xrt_vec3 error_axis | ||
| float error_angle | ||
| bool is_accel | ||
| bool is_rotating | ||
| } | grav | |
| struct { | ||
| struct xrt_vec3 value | ||
| bool manually_fire | ||
| } | gyro_bias | |
Field Documentation
◆ accel
| struct xrt_vec3 m_imu_3dof::accel |
Acceleration.
Referenced by arduino_device_create(), and m_imu_3dof_update().
◆ gyro
| struct xrt_vec3 m_imu_3dof::gyro |
Angular velocity.
Referenced by arduino_device_create(), m_imu_3dof_update(), and rift_s_controller_get_fusion_pose().
◆ rot
| struct xrt_quat m_imu_3dof::rot |
Orientation.
Referenced by android_device_get_tracked_pose(), arduino_get_fusion_pose(), daydream_get_fusion_pose(), m_imu_3dof_update(), and psvr_device_get_tracked_pose().
The documentation for this struct was generated from the following file:
- auxiliary/math/m_imu_3dof.h