Loading...
Searching...
No Matches
arduino_device.c File Reference
Arduino felxable input device code. More...
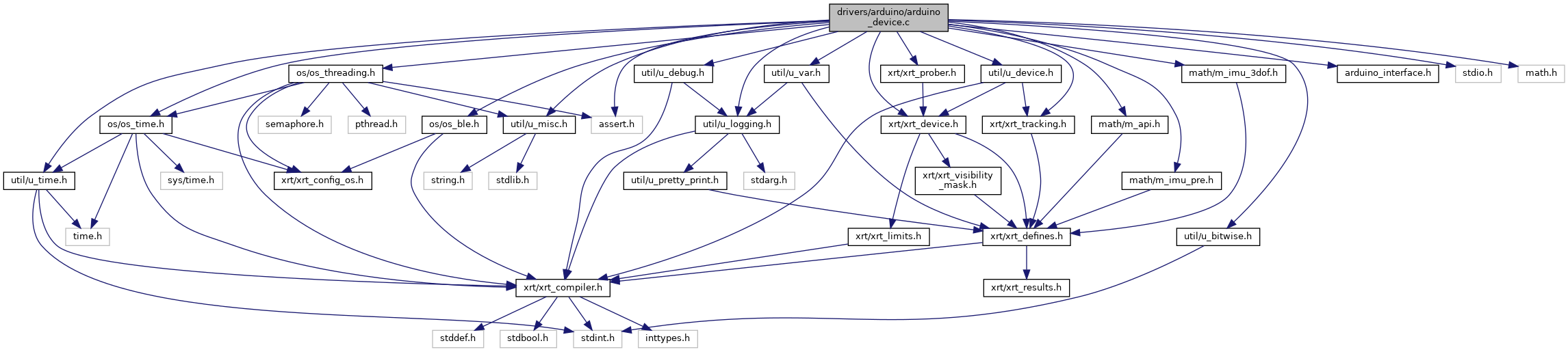
#include "xrt/xrt_device.h"#include "xrt/xrt_prober.h"#include "xrt/xrt_tracking.h"#include "os/os_ble.h"#include "os/os_time.h"#include "os/os_threading.h"#include "math/m_api.h"#include "math/m_imu_pre.h"#include "math/m_imu_3dof.h"#include "util/u_var.h"#include "util/u_time.h"#include "util/u_misc.h"#include "util/u_debug.h"#include "util/u_device.h"#include "util/u_bitwise.h"#include "util/u_logging.h"#include "arduino_interface.h"#include <stdio.h>#include <math.h>#include <assert.h>
Include dependency graph for arduino_device.c:
Data Structures | |
| struct | arduino_parsed_sample |
| A parsed sample of accel and gyro. More... | |
| struct | arduino_parsed_input |
| struct | arduino_device |
Macros | |
| #define | ARDUINO_TRACE(d, ...) U_LOG_XDEV_IFL_T(&d->base, d->log_level, __VA_ARGS__) |
| #define | ARDUINO_DEBUG(d, ...) U_LOG_XDEV_IFL_D(&d->base, d->log_level, __VA_ARGS__) |
| #define | ARDUINO_INFO(d, ...) U_LOG_XDEV_IFL_I(&d->base, d->log_level, __VA_ARGS__) |
| #define | ARDUINO_WARN(d, ...) U_LOG_XDEV_IFL_W(&d->base, d->log_level, __VA_ARGS__) |
| #define | ARDUINO_ERROR(d, ...) U_LOG_XDEV_IFL_E(&d->base, d->log_level, __VA_ARGS__) |
| #define | DEG_TO_RAD_MULTIPLIER ((double)M_PI / 180.0) |
Functions | |
| static struct arduino_device * | arduino_device (struct xrt_device *xdev) |
| static uint32_t | calc_delta_and_handle_rollover (uint32_t next, uint32_t last) |
| static int16_t | read_i16 (const uint8_t *buffer, size_t offset) |
| static void | update_fusion (struct arduino_device *ad, struct arduino_parsed_sample *sample, timepoint_ns timestamp_ns, time_duration_ns delta_ns) |
| static void | arduino_parse_input (struct arduino_device *ad, void *data, struct arduino_parsed_input *input) |
| static bool | arduino_read_one_packet (struct arduino_device *ad, uint8_t *buffer, size_t size) |
| Reads one packet from the device,handles locking and checking if the thread has been told to shut down. | |
| static void * | arduino_run_thread (void *ptr) |
| static xrt_result_t | arduino_get_fusion_pose (struct arduino_device *ad, enum xrt_input_name name, struct xrt_space_relation *out_relation) |
| static void | arduino_device_destroy (struct xrt_device *xdev) |
| static xrt_result_t | arduino_device_update_inputs (struct xrt_device *xdev) |
| static xrt_result_t | arduino_device_get_tracked_pose (struct xrt_device *xdev, enum xrt_input_name name, int64_t at_timestamp_ns, struct xrt_space_relation *out_relation) |
| struct xrt_device * | arduino_device_create (struct os_ble_device *ble) |
| Create a arduino device from a ble notify. | |
Variables | |
| static struct xrt_binding_input_pair | simple_inputs [4] |
| static struct xrt_binding_profile | binding_profiles [1] |
Detailed Description
Arduino felxable input device code.
Function Documentation
◆ arduino_get_fusion_pose()
|
static |
- Todo:
- assuming that orientation is actually currently tracked.
References m_imu_3dof::rot, and XRT_SUCCESS.
◆ arduino_read_one_packet()
|
static |
Reads one packet from the device,handles locking and checking if the thread has been told to shut down.
References os_ble_read().
Variable Documentation
◆ binding_profiles
|
static |
Initial value:
= {
{
.name = XRT_DEVICE_SIMPLE_CONTROLLER,
.inputs = simple_inputs,
.input_count = ARRAY_SIZE(simple_inputs),
.outputs = NULL,
.output_count = 0,
},
}
◆ simple_inputs
|
static |
Initial value:
= {
{XRT_INPUT_SIMPLE_SELECT_CLICK, XRT_INPUT_DAYDREAM_BAR_CLICK},
{XRT_INPUT_SIMPLE_MENU_CLICK, XRT_INPUT_DAYDREAM_CIRCLE_CLICK},
{XRT_INPUT_SIMPLE_GRIP_POSE, XRT_INPUT_DAYDREAM_POSE},
{XRT_INPUT_SIMPLE_AIM_POSE, XRT_INPUT_DAYDREAM_POSE},
}