Frameserver that generates frames. More...
#include <xrt/xrt_frameserver.h>
Static Public Member Functions | |
| static bool | xrt_fs_enumerate_modes (struct xrt_fs *xfs, struct xrt_fs_mode **out_modes, uint32_t *out_count) |
| Enumerate all available modes that this frameserver supports. | |
| static bool | xrt_fs_configure_capture (struct xrt_fs *xfs, struct xrt_fs_capture_parameters *cp) |
| Set the capture parameters, may not be supported on all capture devices. | |
| static bool | xrt_fs_stream_start (struct xrt_fs *xfs, struct xrt_frame_sink *xs, enum xrt_fs_capture_type capture_type, uint32_t descriptor_index) |
| Start the capture stream. | |
| static bool | xrt_fs_slam_stream_start (struct xrt_fs *xfs, struct xrt_slam_sinks *sinks) |
| Setup SLAM sinks for all the sensors a SLAM implementation may supports and start the frame server stream. | |
| static bool | xrt_fs_stream_stop (struct xrt_fs *xfs) |
| Stop the capture stream. | |
| static bool | xrt_fs_is_running (struct xrt_fs *xfs) |
| Is the capture stream running. | |
Data Fields | |
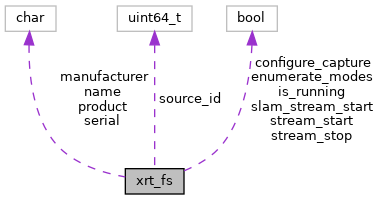
| char | name [512] |
| Name of the frame server source, from the subsystem. | |
| char | product [32] |
| Frame server product identifier, matches the prober device. | |
| char | manufacturer [32] |
| Frame server manufacturer, matches the prober device. | |
| char | serial [32] |
| Frame server serial number, matches the prober device. | |
| uint64_t | source_id |
| All frames produced by this frameserver are tagged with this id. | |
| bool(* | enumerate_modes )(struct xrt_fs *xfs, struct xrt_fs_mode **out_modes, uint32_t *out_count) |
| Enumerate all available modes that this frameserver supports. | |
| bool(* | configure_capture )(struct xrt_fs *xfs, struct xrt_fs_capture_parameters *cp) |
| Set the capture parameters, may not be supported on all capture devices. | |
| bool(* | stream_start )(struct xrt_fs *xfs, struct xrt_frame_sink *xs, enum xrt_fs_capture_type capture_type, uint32_t descriptor_index) |
| Start the capture stream. | |
| bool(* | slam_stream_start )(struct xrt_fs *xfs, struct xrt_slam_sinks *sinks) |
| Setup SLAM sinks for all the sensors a SLAM implementation may supports and start the frame server stream. | |
| bool(* | stream_stop )(struct xrt_fs *xfs) |
| Stop the capture stream. | |
| bool(* | is_running )(struct xrt_fs *xfs) |
| Is the capture stream running. | |
Detailed Description
Frameserver that generates frames.
Multiple subframes (like stereo and mipmaps) can be generate in one frame.
Member Function Documentation
◆ xrt_fs_configure_capture()
|
inlinestatic |
Set the capture parameters, may not be supported on all capture devices.
Helper for calling through the function pointer.
References configure_capture.
◆ xrt_fs_enumerate_modes()
|
inlinestatic |
Enumerate all available modes that this frameserver supports.
Helper for calling through the function pointer.
References enumerate_modes.
◆ xrt_fs_is_running()
Is the capture stream running.
Helper for calling through the function pointer.
References is_running.
◆ xrt_fs_slam_stream_start()
|
inlinestatic |
Setup SLAM sinks for all the sensors a SLAM implementation may supports and start the frame server stream.
Use xrt_fs::stream_start instead if you only need the image stream.
- Note
- Having this method extends the scope of the frameserver to something more akin to a generic data source instead of just serving frames.
- Todo:
- Fix this incongruence. Maybe rename the interface to xrt_data_source.
Helper for calling through the function pointer.
References slam_stream_start.
◆ xrt_fs_stream_start()
|
inlinestatic |
◆ xrt_fs_stream_stop()
Field Documentation
◆ configure_capture
| bool(* xrt_fs::configure_capture) (struct xrt_fs *xfs, struct xrt_fs_capture_parameters *cp) |
Set the capture parameters, may not be supported on all capture devices.
Referenced by euroc_player_create(), rs_source_create(), v4l2_fs_create(), wmr_source_create(), and xrt_fs_configure_capture().
◆ enumerate_modes
| bool(* xrt_fs::enumerate_modes) (struct xrt_fs *xfs, struct xrt_fs_mode **out_modes, uint32_t *out_count) |
Enumerate all available modes that this frameserver supports.
Referenced by euroc_player_create(), rs_source_create(), v4l2_fs_create(), wmr_source_create(), and xrt_fs_enumerate_modes().
◆ is_running
Is the capture stream running.
Referenced by euroc_player_create(), rs_source_create(), v4l2_fs_create(), wmr_source_create(), and xrt_fs_is_running().
◆ manufacturer
| char xrt_fs::manufacturer[32] |
Frame server manufacturer, matches the prober device.
Referenced by euroc_player_create(), rs_source_create(), v4l2_fs_create(), and wmr_source_create().
◆ name
| char xrt_fs::name[512] |
Name of the frame server source, from the subsystem.
Referenced by ipcproto.common.Arg::__init__(), ipcproto.common.Call::__init__(), bindings.Profile::__init__(), ipcproto.common.Arg::dump(), ipcproto.common.Call::dump(), euroc_player_create(), ipcproto.common.Arg::get_func_argument_in(), ipcproto.common.Arg::get_func_argument_out(), ipcproto.common.Arg::get_struct_field(), gui_program::gui_scene_calibrate(), rs_source_create(), v4l2_fs_create(), wmr_source_create(), ipcproto.common.Call::write_call_decl(), ipcproto.common.Call::write_handler_decl(), ipcproto.common.Call::write_receive_decl(), and ipcproto.common.Call::write_send_decl().
◆ product
| char xrt_fs::product[32] |
Frame server product identifier, matches the prober device.
Referenced by euroc_player_create(), rs_source_create(), v4l2_fs_create(), and wmr_source_create().
◆ serial
| char xrt_fs::serial[32] |
Frame server serial number, matches the prober device.
Referenced by euroc_player_create(), rs_source_create(), v4l2_fs_create(), and wmr_source_create().
◆ slam_stream_start
| bool(* xrt_fs::slam_stream_start) (struct xrt_fs *xfs, struct xrt_slam_sinks *sinks) |
Setup SLAM sinks for all the sensors a SLAM implementation may supports and start the frame server stream.
Use xrt_fs::stream_start instead if you only need the image stream.
- Note
- Having this method extends the scope of the frameserver to something more akin to a generic data source instead of just serving frames.
- Todo:
- Fix this incongruence. Maybe rename the interface to xrt_data_source.
Referenced by euroc_player_create(), rs_source_create(), wmr_source_create(), and xrt_fs_slam_stream_start().
◆ source_id
| uint64_t xrt_fs::source_id |
All frames produced by this frameserver are tagged with this id.
Referenced by euroc_player_create(), euroc_player_load_next_frame(), p_factory_ensure_slam_frameserver(), rs2xrt_frame(), rs_source_create(), v4l2_fs_mainloop(), vf_fs_frame(), and wmr_source_create().
◆ stream_start
| bool(* xrt_fs::stream_start) (struct xrt_fs *xfs, struct xrt_frame_sink *xs, enum xrt_fs_capture_type capture_type, uint32_t descriptor_index) |
Start the capture stream.
Referenced by euroc_player_create(), rs_source_create(), v4l2_fs_create(), wmr_source_create(), and xrt_fs_stream_start().
◆ stream_stop
Stop the capture stream.
Referenced by euroc_player_create(), rs_source_create(), v4l2_fs_create(), wmr_source_create(), and xrt_fs_stream_stop().
The documentation for this interface was generated from the following file: