Loading...
Searching...
No Matches
Implementation of ContactGlove device driver. More...
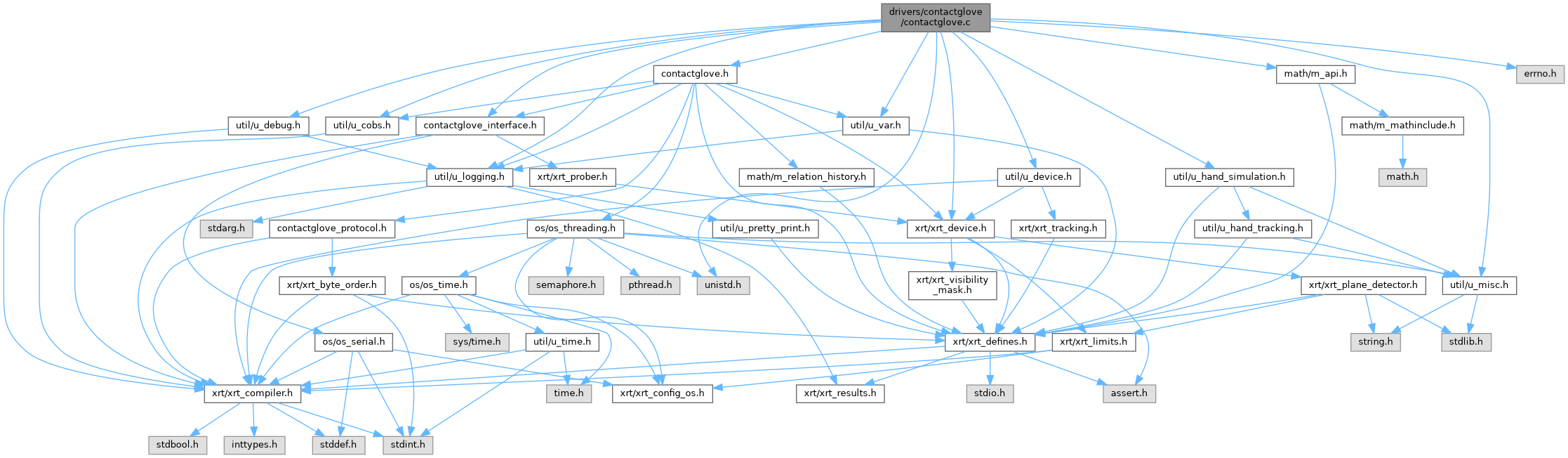
#include <xrt/xrt_device.h>#include <util/u_logging.h>#include <util/u_misc.h>#include <util/u_device.h>#include <util/u_debug.h>#include <util/u_var.h>#include <util/u_cobs.h>#include <util/u_hand_simulation.h>#include <math/m_api.h>#include "contactglove_interface.h"#include "contactglove.h"#include <unistd.h>#include <errno.h>
Include dependency graph for contactglove.c:
Macros | |
| #define | DONGLE_TRACE(dongle, ...) U_LOG_IFL_T(dongle->log_level, __VA_ARGS__) |
| #define | DONGLE_DEBUG(dongle, ...) U_LOG_IFL_D(dongle->log_level, __VA_ARGS__) |
| #define | DONGLE_INFO(dongle, ...) U_LOG_IFL_I(dongle->log_level, __VA_ARGS__) |
| #define | DONGLE_WARN(dongle, ...) U_LOG_IFL_W(dongle->log_level, __VA_ARGS__) |
| #define | DONGLE_ERROR(dongle, ...) U_LOG_IFL_E(dongle->log_level, __VA_ARGS__) |
| #define | GLOVE_TRACE(glove, ...) U_LOG_XDEV_IFL_T(&glove->base, glove->dongle->log_level, __VA_ARGS__) |
| #define | GLOVE_DEBUG(glove, ...) U_LOG_XDEV_IFL_D(&glove->base, glove->dongle->log_level, __VA_ARGS__) |
| #define | GLOVE_INFO(glove, ...) U_LOG_XDEV_IFL_I(&glove->base, glove->dongle->log_level, __VA_ARGS__) |
| #define | GLOVE_WARN(glove, ...) U_LOG_XDEV_IFL_W(&glove->base, glove->dongle->log_level, __VA_ARGS__) |
| #define | GLOVE_ERROR(glove, ...) U_LOG_XDEV_IFL_E(&glove->base, glove->dongle->log_level, __VA_ARGS__) |
| #define | UPDATE_TIME(name) glove->base.inputs[CONTACTGLOVE_DEVICE_INPUT_##name].timestamp = glove->raw_input_update_time_ns; |
| #define | UPDATE_BOOL(name, exp) |
| #define | CHECK_RANGE(range) |
| #define | SET_INPUT(input_name) contactglove->base.inputs[CONTACTGLOVE_DEVICE_INPUT_##input_name].name = XRT_INPUT_MAGNETRA2_##input_name; |
Functions | |
| static void | contactglove_none_curl_cal_callback (void *ptr) |
| static void | contactglove_full_curl_cal_callback (void *ptr) |
| static void | contactglove_dongle_destroy (struct contactglove_dongle *dongle) |
| static void | contactglove_dongle_decrement (struct contactglove_dongle *dongle) |
| static uint8_t | crc8 (const uint8_t *data, size_t length) |
| static ssize_t | contactglove_dongle_write (struct contactglove_dongle *dongle, const uint8_t *data, size_t length) |
| static int | contactglove_dongle_send_packet_locked (struct contactglove_dongle *dongle, enum contactglove_to_device_packet_mode mode, const uint8_t *payload, size_t payload_length) |
| static int | contactglove_send_ping (struct contactglove_dongle *dongle, uint8_t nonce) |
| static void | contactglove_ping_handle_glove_timeout (struct contactglove_dongle *dongle, struct contactglove_device *glove, timepoint_ns now) |
| static int | contactglove_request_module_state_locked (struct contactglove_dongle *dongle, struct contactglove_device *glove, enum contactglove_module_kind module_kind) |
| static int | contactglove_set_module_state_locked (struct contactglove_dongle *dongle, struct contactglove_device *glove, enum contactglove_module_kind module, const uint8_t *data, size_t length) |
| static int | contactglove_request_update_module_state_locked (struct contactglove_dongle *dongle, struct contactglove_device *glove) |
| static int | contactglove_ping_tick (struct contactglove_dongle *dongle, timepoint_ns now) |
| static int | contactglove_dongle_thread_tick (struct contactglove_dongle *dongle) |
| static void | contactglove_dongle_handle_packet (void *user_data, const uint8_t *data, size_t length) |
| void * | contactglove_dongle_thread (void *ptr) |
| static void | contactglove_get_curl_values (struct contactglove_device *glove, struct u_hand_tracking_curl_values *curl_values) |
| static xrt_result_t | contactglove_get_tracked_pose (struct xrt_device *xdev, const enum xrt_input_name name, const int64_t at_timestamp_ns, struct xrt_space_relation *out_relation) |
| static void | contactglove_destroy (struct xrt_device *xdev) |
| static xrt_result_t | contactglove_get_battery_status (struct xrt_device *xdev, bool *out_present, bool *out_charging, float *out_charge) |
| static xrt_result_t | contactglove_get_hand_tracking (struct xrt_device *xdev, enum xrt_input_name name, int64_t desired_timestamp_ns, struct xrt_hand_joint_set *out_value, int64_t *out_timestamp_ns) |
| static xrt_result_t | contactglove_update_inputs (struct xrt_device *xdev) |
| static int | contactglove_create_glove (struct contactglove_dongle *dongle, enum contactglove_type type, const char *serial_number, enum xrt_hand hand, struct contactglove_device **out_glove) |
| int | contactglove_create (enum contactglove_type type, const char *serial_number, struct os_serial_device *dongle_serial, struct contactglove_dongle **out_dongle, struct xrt_device **out_xdevs) |
| int | contactglove_dongle_pair (struct contactglove_dongle *dongle) |
| Enable pairing mode on the ContactGlove dongle. | |
Detailed Description
Implementation of ContactGlove device driver.
Macro Definition Documentation
◆ CHECK_RANGE
| #define CHECK_RANGE | ( | range | ) |
Value:
(glove->raw_input.multi_ch_value >= MAGNETRA2_MULTI_CH_RANGE_##range##_START && \
glove->raw_input.multi_ch_value <= MAGNETRA2_MULTI_CH_RANGE_##range##_END)
◆ UPDATE_BOOL
| #define UPDATE_BOOL | ( | name, | |
| exp | |||
| ) |
Value:
glove->base.inputs[CONTACTGLOVE_DEVICE_INPUT_##name].value.boolean = (exp); \
UPDATE_TIME(name)
Function Documentation
◆ contactglove_dongle_pair()
| int contactglove_dongle_pair | ( | struct contactglove_dongle * | dongle | ) |
Enable pairing mode on the ContactGlove dongle.