Loading...
Searching...
No Matches
lm_defines.hpp File Reference
Defines for Levenberg-Marquardt kinematic optimizer. More...
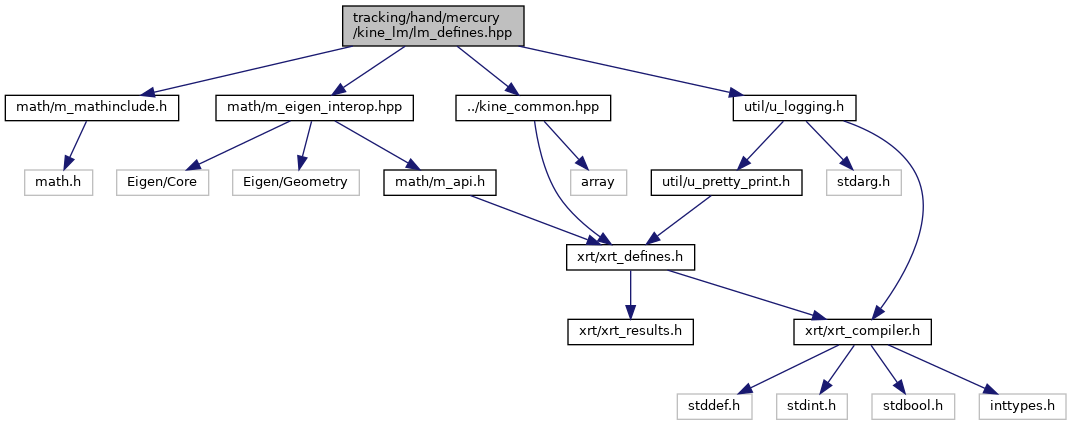
#include "math/m_mathinclude.h"#include "math/m_eigen_interop.hpp"#include "util/u_logging.h"#include "../kine_common.hpp"
Include dependency graph for lm_defines.hpp:
Go to the source code of this file.
Macros | |
| #define | LM_TRACE(lmh, ...) U_LOG_IFL_T(lmh.log_level, __VA_ARGS__) |
| #define | LM_DEBUG(lmh, ...) U_LOG_IFL_D(lmh.log_level, __VA_ARGS__) |
| #define | LM_INFO(lmh, ...) U_LOG_IFL_I(lmh.log_level, __VA_ARGS__) |
| #define | LM_WARN(lmh, ...) U_LOG_IFL_W(lmh.log_level, __VA_ARGS__) |
| #define | LM_ERROR(lmh, ...) U_LOG_IFL_E(lmh.log_level, __VA_ARGS__) |
| #define | USE_HAND_SIZE |
| #define | USE_HAND_TRANSLATION |
| #define | USE_HAND_ORIENTATION |
| #define | USE_EVERYTHING_ELSE |
Functions | |
| template<typename T > | |
| T | xrt::tracking::hand::mercury::lm::rad (T degrees) |
| constexpr size_t | xrt::tracking::hand::mercury::lm::calc_input_size (bool optimize_hand_size) |
| constexpr size_t | xrt::tracking::hand::mercury::lm::calc_residual_size (bool stability, bool optimize_hand_size, int num_views) |
Variables | |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kNumNNJoints = 21 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kNumFingers = 5 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kNumJointsInFinger = 5 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kNumOrientationsInFinger = 4 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kMetacarpalBoneDim = 3 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kProximalBoneDim = 2 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kFingerDim = kProximalBoneDim + 2 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kThumbDim = kMetacarpalBoneDim + 2 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHandSizeDim = 1 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHandTranslationDim = 3 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHandOrientationDim = 3 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHRTC_HandSize = 1 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHRTC_RootBoneTranslation = 3 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHRTC_RootBoneOrientation = 3 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHRTC_ThumbMCPSwingTwist = 3 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHRTC_ThumbCurls = 2 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHRTC_ProximalSimilarity = 2 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHRTC_FingerMCPSwingTwist = 0 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHRTC_FingerPXMSwing = 2 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHRTC_FingerCurls = 2 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHRTC_CurlSimilarity = 1 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHandResidualOneSideXY = (kNumNNJoints * 2) |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHandResidualOneSideDepth = 20 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHandResidualOneSideMatchCurls = 0 |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHandResidualOneSideSize |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHandResidualTemporalConsistencyOneFingerSize |
| static constexpr size_t | xrt::tracking::hand::mercury::lm::kHandResidualTemporalConsistencySize |
| static constexpr HandScalar | xrt::tracking::hand::mercury::lm::kPlausibilityRoot = 1.0 |
| static constexpr HandScalar | xrt::tracking::hand::mercury::lm::kPlausibilityProximalSimilarity = 0.05f * kPlausibilityRoot |
| static constexpr HandScalar | xrt::tracking::hand::mercury::lm::kPlausibilityCurlSimilarityHard = 0.10f * kPlausibilityRoot |
| static constexpr HandScalar | xrt::tracking::hand::mercury::lm::kPlausibilityCurlSimilaritySoft = 0.05f * kPlausibilityRoot |
| static const class HandLimit | xrt::tracking::hand::mercury::lm::the_limit = {} |
Detailed Description
Defines for Levenberg-Marquardt kinematic optimizer.
Variable Documentation
◆ kHandResidualOneSideSize
|
staticconstexpr |
Initial value:
=
kHandResidualOneSideXY + kHandResidualOneSideDepth + kHandResidualOneSideMatchCurls
◆ kHandResidualTemporalConsistencyOneFingerSize
|
staticconstexpr |
Initial value:
=
kHRTC_FingerMCPSwingTwist +
kHRTC_FingerPXMSwing +
kHRTC_FingerCurls +
0
◆ kHandResidualTemporalConsistencySize
|
staticconstexpr |
Initial value:
=
kHRTC_RootBoneTranslation +
kHRTC_RootBoneOrientation +
kHRTC_ThumbMCPSwingTwist +
kHRTC_ThumbCurls +
(kHandResidualTemporalConsistencyOneFingerSize * 4) +
0