One Euro filter for a unit quaternion (used as 3D rotation). More...
#include <math/m_filter_one_euro.h>
Public Member Functions | |
| void | m_filter_euro_quat_init (struct m_filter_euro_quat *f, double fc_min, double fc_min_d, double beta) |
| Initialize a unit quaternion (3D rotation) filter. | |
| void | m_filter_euro_quat_run (struct m_filter_euro_quat *f, uint64_t ts, const struct xrt_quat *in_y, struct xrt_quat *out_y) |
| Filter a measurement and commit changes to filter state. | |
Data Fields | |
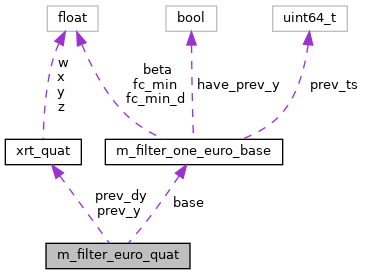
| struct m_filter_one_euro_base | base |
| Base/common data. | |
| struct xrt_quat | prev_y |
| The most recent measurement, after filtering. | |
| struct xrt_quat | prev_dy |
| The most recent sample derivative, after filtering. | |
Detailed Description
One Euro filter for a unit quaternion (used as 3D rotation).
Member Function Documentation
◆ m_filter_euro_quat_init()
| void m_filter_euro_quat_init | ( | struct m_filter_euro_quat * | f, |
| double | fc_min, | ||
| double | fc_min_d, | ||
| double | beta | ||
| ) |
Initialize a unit quaternion (3D rotation) filter.
- Parameters
-
f self pointer fc_min Minimum frequency cutoff for filter fc_min_d Minimum frequency cutoff for derivative filter beta Beta value for "responsiveness" of filter
References base.
◆ m_filter_euro_quat_run()
| void m_filter_euro_quat_run | ( | struct m_filter_euro_quat * | f, |
| uint64_t | ts, | ||
| const struct xrt_quat * | in_y, | ||
| struct xrt_quat * | out_y | ||
| ) |
Filter a measurement and commit changes to filter state.
- Parameters
-
[in,out] f self pointer ts measurement timestamp in_y raw measurement [out] out_y filtered measurement
References base, filter_one_euro_compute_alpha(), filter_one_euro_compute_alpha_d(), filter_one_euro_handle_first_sample(), xrt_quat::math_quat_unrotate(), prev_dy, prev_y, and xrt_quat::XRT_QUAT_IDENTITY.
Field Documentation
◆ base
| struct m_filter_one_euro_base m_filter_euro_quat::base |
Base/common data.
Referenced by m_filter_euro_quat_init(), and m_filter_euro_quat_run().
◆ prev_dy
| struct xrt_quat m_filter_euro_quat::prev_dy |
The most recent sample derivative, after filtering.
Referenced by m_filter_euro_quat_run().
◆ prev_y
| struct xrt_quat m_filter_euro_quat::prev_y |
The most recent measurement, after filtering.
Referenced by m_filter_euro_quat_run().
The documentation for this struct was generated from the following file:
- auxiliary/math/m_filter_one_euro.h