Loading...
Searching...
No Matches
psmv_parsed_calibration_zcm1 Struct Reference
Parsed calibration data from a ZCM1 device. More...
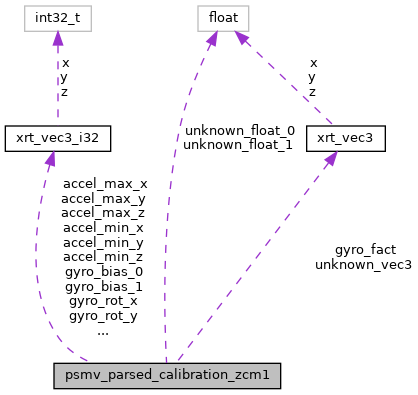
Collaboration diagram for psmv_parsed_calibration_zcm1:
Data Fields | |
| struct xrt_vec3_i32 | accel_min_x |
| struct xrt_vec3_i32 | accel_max_x |
| struct xrt_vec3_i32 | accel_min_y |
| struct xrt_vec3_i32 | accel_max_y |
| struct xrt_vec3_i32 | accel_min_z |
| struct xrt_vec3_i32 | accel_max_z |
| struct xrt_vec3 | gyro_fact |
| From: https://github.com/nitsch/moveonpc/wiki/Calibration-data. | |
| struct xrt_vec3_i32 | gyro_bias_0 |
| struct xrt_vec3_i32 | gyro_bias_1 |
| struct xrt_vec3_i32 | gyro_rot_x |
| struct xrt_vec3_i32 | gyro_rot_y |
| struct xrt_vec3_i32 | gyro_rot_z |
| struct xrt_vec3 | unknown_vec3 |
| float | unknown_float_0 |
| float | unknown_float_1 |
Detailed Description
Parsed calibration data from a ZCM1 device.
Field Documentation
◆ gyro_fact
| struct xrt_vec3 psmv_parsed_calibration_zcm1::gyro_fact |
From: https://github.com/nitsch/moveonpc/wiki/Calibration-data.
Coded as the one before. The values are very near to 1.0.
I observed, that when I multiply this vector with the gyro bias vector before subtracting from the gyro 80rpm measures, I get a better calibration.
So to get the accurate 80rpm measures: GyroMeasure80rpm-(GyroBias1*UnknownVector2) or GyroMeasure80rpm-(GyroBias2*UnknownVector2)
Referenced by psmv_device_create().
The documentation for this struct was generated from the following file:
- drivers/psmv/psmv_driver.c