RealSense source of camera and IMU data. More...
Data Fields | ||
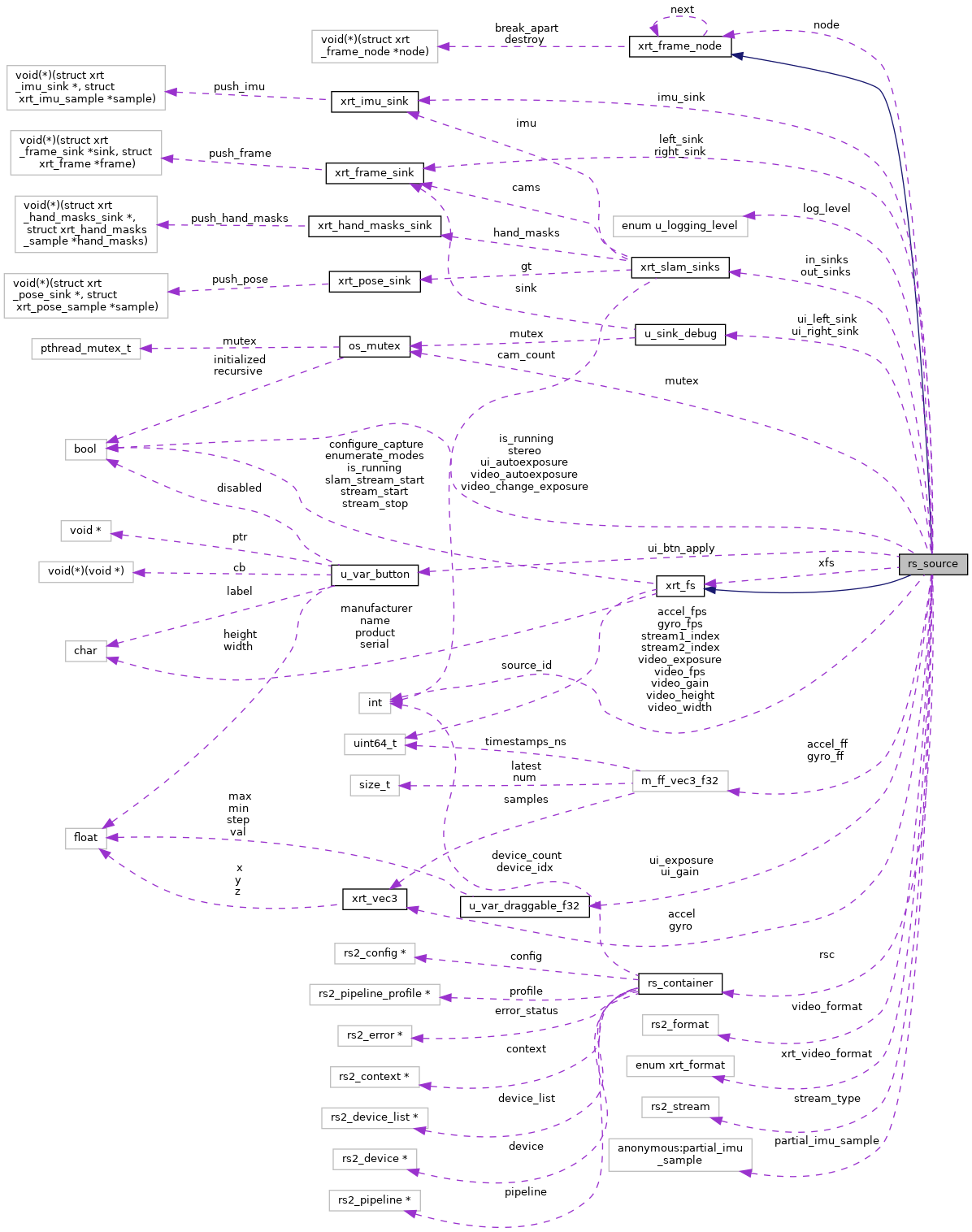
| struct xrt_fs | xfs | |
| struct xrt_frame_node | node | |
| enum u_logging_level | log_level | |
| Log level. | ||
| struct xrt_frame_sink | left_sink | |
| Intermediate sink for left camera frames. | ||
| struct xrt_frame_sink | right_sink | |
| Intermediate sink for right camera frames. | ||
| struct xrt_imu_sink | imu_sink | |
| Intermediate sink for IMU samples. | ||
| struct xrt_slam_sinks | in_sinks | |
| Pointers to intermediate sinks. | ||
| struct xrt_slam_sinks | out_sinks | |
| Pointers to downstream sinks. | ||
| struct u_sink_debug | ui_left_sink | |
| Sink to display left frames in UI. | ||
| struct u_sink_debug | ui_right_sink | |
| Sink to display right frames in UI. | ||
| struct m_ff_vec3_f32 * | gyro_ff | |
| Queue of gyroscope data to display in UI. | ||
| struct m_ff_vec3_f32 * | accel_ff | |
| Queue of accelerometer data to display in UI. | ||
| bool | ui_autoexposure | |
| Autoexposure value to set. | ||
| struct u_var_draggable_f32 | ui_exposure | |
| Exposure value to set. | ||
| struct u_var_draggable_f32 | ui_gain | |
| Gain value to set. | ||
| struct u_var_button | ui_btn_apply | |
| Apply changes button. | ||
| struct rs_container | rsc | |
| Container of RealSense API objects. | ||
| bool | stereo | |
| Indicates whether to use one or two cameras. | ||
| rs2_format | video_format | |
| Indicates desired frame color format. | ||
| enum xrt_format | xrt_video_format | |
| corresponding format for video_format | ||
| int | video_width | |
| Indicates desired frame width. | ||
| int | video_height | |
| Indicates desired frame height. | ||
| int | video_fps | |
| Indicates desired fps. | ||
| bool | video_change_exposure | |
| Indicates whether to overwrite external device exposure settings. | ||
| bool | video_autoexposure | |
| Indicates whether to enable autoexposure or use provided values. | ||
| int | video_exposure | |
| Indicates desired exposure time in microseconds. | ||
| int | video_gain | |
| Indicates desired gain (16-248) | ||
| int | gyro_fps | |
| Indicates desired gyroscope samples per second. | ||
| int | accel_fps | |
| Indicates desired accelerometer samples per second. | ||
| rs2_stream | stream_type | |
| Indicates desired stream type for the cameras. | ||
| int | stream1_index | |
| Indicates desired stream index for first stream. | ||
| int | stream2_index | |
| Indicates desired stream index for second stream. | ||
| bool | is_running | |
| Whether the device is streaming. | ||
| struct { | ||
| struct os_mutex mutex | ||
| Gyro and accel come from separate threads. More... | ||
| struct xrt_vec3 accel | ||
| Last received accelerometer values. More... | ||
| struct xrt_vec3 gyro | ||
| Last received gyroscope values. More... | ||
| } | partial_imu_sample | |
| Very simple struct to merge the two acc/gyr streams into one IMU stream. | ||
 Data Fields inherited from xrt_fs Data Fields inherited from xrt_fs | ||
| char | name [512] | |
| Name of the frame server source, from the subsystem. | ||
| char | product [32] | |
| Frame server product identifier, matches the prober device. | ||
| char | manufacturer [32] | |
| Frame server manufacturer, matches the prober device. | ||
| char | serial [32] | |
| Frame server serial number, matches the prober device. | ||
| uint64_t | source_id | |
| All frames produced by this frameserver are tagged with this id. | ||
| bool(* | enumerate_modes )(struct xrt_fs *xfs, struct xrt_fs_mode **out_modes, uint32_t *out_count) | |
| Enumerate all available modes that this frameserver supports. | ||
| bool(* | configure_capture )(struct xrt_fs *xfs, struct xrt_fs_capture_parameters *cp) | |
| Set the capture parameters, may not be supported on all capture devices. | ||
| bool(* | stream_start )(struct xrt_fs *xfs, struct xrt_frame_sink *xs, enum xrt_fs_capture_type capture_type, uint32_t descriptor_index) | |
| Start the capture stream. | ||
| bool(* | slam_stream_start )(struct xrt_fs *xfs, struct xrt_slam_sinks *sinks) | |
| Setup SLAM sinks for all the sensors a SLAM implementation may supports and start the frame server stream. | ||
| bool(* | stream_stop )(struct xrt_fs *xfs) | |
| Stop the capture stream. | ||
| bool(* | is_running )(struct xrt_fs *xfs) | |
| Is the capture stream running. | ||
| Data Fields inherited from xrt_frame_node | ||
| struct xrt_frame_node * | next | |
| void(* | break_apart )(struct xrt_frame_node *node) | |
| Called first in when the graph is being destroyed, remove any references frames and other objects and stop threads. | ||
| void(* | destroy )(struct xrt_frame_node *node) | |
| Do the actual freeing of the objects. | ||
Additional Inherited Members | |
| Static Public Member Functions inherited from xrt_fs | |
| static bool | xrt_fs_enumerate_modes (struct xrt_fs *xfs, struct xrt_fs_mode **out_modes, uint32_t *out_count) |
| Enumerate all available modes that this frameserver supports. | |
| static bool | xrt_fs_configure_capture (struct xrt_fs *xfs, struct xrt_fs_capture_parameters *cp) |
| Set the capture parameters, may not be supported on all capture devices. | |
| static bool | xrt_fs_stream_start (struct xrt_fs *xfs, struct xrt_frame_sink *xs, enum xrt_fs_capture_type capture_type, uint32_t descriptor_index) |
| Start the capture stream. | |
| static bool | xrt_fs_slam_stream_start (struct xrt_fs *xfs, struct xrt_slam_sinks *sinks) |
| Setup SLAM sinks for all the sensors a SLAM implementation may supports and start the frame server stream. | |
| static bool | xrt_fs_stream_stop (struct xrt_fs *xfs) |
| Stop the capture stream. | |
| static bool | xrt_fs_is_running (struct xrt_fs *xfs) |
| Is the capture stream running. | |
Detailed Description
RealSense source of camera and IMU data.
Field Documentation
◆ accel
| struct xrt_vec3 rs_source::accel |
Last received accelerometer values.
Referenced by partial_imu_sample_push().
◆ accel_ff
| struct m_ff_vec3_f32* rs_source::accel_ff |
Queue of accelerometer data to display in UI.
Referenced by rs_source_create().
◆ accel_fps
| int rs_source::accel_fps |
Indicates desired accelerometer samples per second.
Referenced by check_global_time(), partial_imu_sample_push(), and rs_source_create().
◆ gyro
| struct xrt_vec3 rs_source::gyro |
Last received gyroscope values.
Referenced by partial_imu_sample_push().
◆ gyro_ff
| struct m_ff_vec3_f32* rs_source::gyro_ff |
Queue of gyroscope data to display in UI.
Referenced by rs_source_create().
◆ gyro_fps
| int rs_source::gyro_fps |
Indicates desired gyroscope samples per second.
Referenced by check_global_time(), partial_imu_sample_push(), and rs_source_create().
◆ imu_sink
| struct xrt_imu_sink rs_source::imu_sink |
Intermediate sink for IMU samples.
Referenced by rs_source_create().
◆ in_sinks
| struct xrt_slam_sinks rs_source::in_sinks |
Pointers to intermediate sinks.
Referenced by partial_imu_sample_push(), and rs_source_create().
◆ is_running
| bool rs_source::is_running |
Whether the device is streaming.
◆ left_sink
| struct xrt_frame_sink rs_source::left_sink |
Intermediate sink for left camera frames.
Referenced by receive_left_frame(), and rs_source_create().
◆ log_level
| enum u_logging_level rs_source::log_level |
Log level.
Referenced by rs_source_create().
◆ mutex
| struct os_mutex rs_source::mutex |
Gyro and accel come from separate threads.
Referenced by partial_imu_sample_push(), and rs_source_create().
◆ out_sinks
| struct xrt_slam_sinks rs_source::out_sinks |
Pointers to downstream sinks.
Referenced by receive_left_frame().
◆ [struct]
| struct { ... } rs_source::partial_imu_sample |
Very simple struct to merge the two acc/gyr streams into one IMU stream.
It just pushes on every gyro sample and reuses the latest acc sample.
Referenced by partial_imu_sample_push(), and rs_source_create().
◆ right_sink
| struct xrt_frame_sink rs_source::right_sink |
Intermediate sink for right camera frames.
Referenced by rs_source_create().
◆ rsc
| struct rs_container rs_source::rsc |
Container of RealSense API objects.
Referenced by rs_source_create(), and set_option_in_all_sensors().
◆ stereo
| bool rs_source::stereo |
Indicates whether to use one or two cameras.
Referenced by rs_source_create().
◆ stream1_index
| int rs_source::stream1_index |
Indicates desired stream index for first stream.
Referenced by rs_source_create().
◆ stream2_index
| int rs_source::stream2_index |
Indicates desired stream index for second stream.
Referenced by rs_source_create().
◆ stream_type
| rs2_stream rs_source::stream_type |
Indicates desired stream type for the cameras.
Referenced by rs_source_create().
◆ ui_autoexposure
| bool rs_source::ui_autoexposure |
Autoexposure value to set.
Referenced by rs_source_create().
◆ ui_btn_apply
| struct u_var_button rs_source::ui_btn_apply |
Apply changes button.
Referenced by rs_source_create().
◆ ui_exposure
| struct u_var_draggable_f32 rs_source::ui_exposure |
Exposure value to set.
Referenced by rs_source_create().
◆ ui_gain
| struct u_var_draggable_f32 rs_source::ui_gain |
Gain value to set.
Referenced by rs_source_create().
◆ ui_left_sink
| struct u_sink_debug rs_source::ui_left_sink |
Sink to display left frames in UI.
Referenced by receive_left_frame(), and rs_source_create().
◆ ui_right_sink
| struct u_sink_debug rs_source::ui_right_sink |
Sink to display right frames in UI.
Referenced by rs_source_create().
◆ video_autoexposure
| bool rs_source::video_autoexposure |
Indicates whether to enable autoexposure or use provided values.
Referenced by rs_source_create(), and update_options().
◆ video_change_exposure
| bool rs_source::video_change_exposure |
Indicates whether to overwrite external device exposure settings.
Referenced by rs_source_create().
◆ video_exposure
| int rs_source::video_exposure |
Indicates desired exposure time in microseconds.
Referenced by rs_source_create(), and update_options().
◆ video_format
| rs2_format rs_source::video_format |
Indicates desired frame color format.
Referenced by rs_source_create().
◆ video_fps
| int rs_source::video_fps |
Indicates desired fps.
Referenced by rs_source_create().
◆ video_gain
| int rs_source::video_gain |
Indicates desired gain (16-248)
Referenced by rs_source_create(), and update_options().
◆ video_height
| int rs_source::video_height |
Indicates desired frame height.
Referenced by rs2xrt_frame(), rs_source_create(), and rs_source_enumerate_modes().
◆ video_width
| int rs_source::video_width |
Indicates desired frame width.
Referenced by rs2xrt_frame(), rs_source_create(), and rs_source_enumerate_modes().
◆ xrt_video_format
| enum xrt_format rs_source::xrt_video_format |
corresponding format for video_format
Referenced by rs2xrt_frame(), and rs_source_enumerate_modes().
The documentation for this struct was generated from the following file:
- drivers/realsense/rs_hdev.c