Stereo camera calibration data to be given to trackers. More...
#include <tracking/t_tracking.h>
Public Member Functions | |
| void | t_stereo_camera_calibration_alloc (struct t_stereo_camera_calibration **out_c, const enum t_camera_distortion_model distortion_model) |
Allocates a new stereo calibration data, unreferences the old data pointed to by out_c. | |
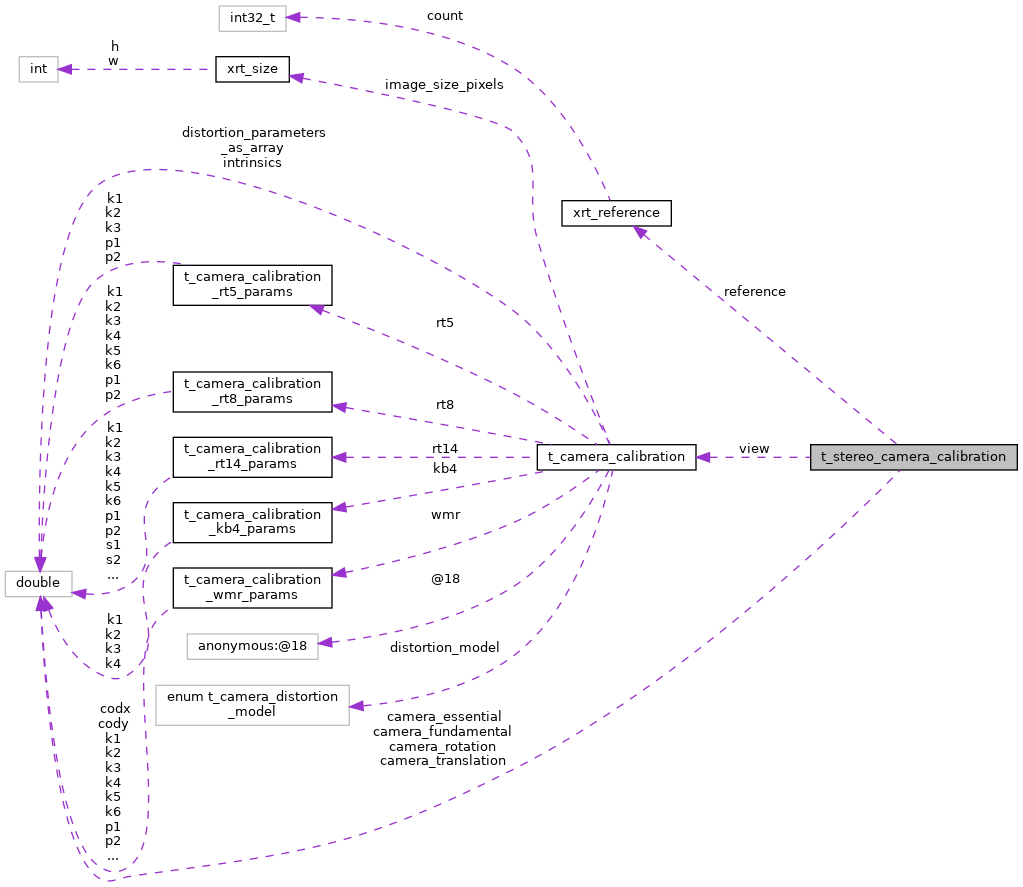
Data Fields | |
| struct xrt_reference | reference |
| Ref counting. | |
| struct t_camera_calibration | view [2] |
| Calibration of individual views/sensor. | |
| double | camera_translation [3] |
| Translation from first to second in the stereo pair. | |
| double | camera_rotation [3][3] |
| Rotation matrix from first to second in the stereo pair. | |
| double | camera_essential [3][3] |
| Essential matrix. | |
| double | camera_fundamental [3][3] |
| Fundamental matrix. | |
Related Symbols | |
(Note that these are not member symbols.) | |
| static void | t_stereo_camera_calibration_reference (struct t_stereo_camera_calibration **dst, struct t_stereo_camera_calibration *src) |
| Update the reference counts on a stereo calibration data(s). | |
| void | t_stereo_camera_calibration_dump (struct t_stereo_camera_calibration *c) |
| Small helper function that dumps the stereo calibration data to logging. | |
| bool | t_stereo_camera_calibration_load_v1 (FILE *calib_file, struct t_stereo_camera_calibration **out_data) |
| Load stereo calibration data from a given file in v1 format (binary). | |
| bool | t_stereo_camera_calibration_save_v1 (FILE *calib_file, struct t_stereo_camera_calibration *data) |
| Save the given stereo calibration data to the given file in v1 format (binary). | |
| bool | t_stereo_camera_calibration_from_json_v2 (cJSON *json, struct t_stereo_camera_calibration **out_stereo) |
| Parse the json object in v2 format into stereo calibration data. | |
| bool | t_stereo_camera_calibration_to_json_v2 (cJSON **out_cjson, struct t_stereo_camera_calibration *data) |
| Convert the given stereo calibration data into a json object in v2 format. | |
| bool | t_stereo_camera_calibration_load (const char *calib_path, struct t_stereo_camera_calibration **out_data) |
| Load stereo calibration data from a given file path. | |
| bool | t_stereo_camera_calibration_save (const char *calib_path, struct t_stereo_camera_calibration *data) |
| Save the given stereo calibration data to the given file path. | |
Detailed Description
Stereo camera calibration data to be given to trackers.
Field Documentation
◆ camera_essential
| double t_stereo_camera_calibration::camera_essential[3][3] |
Essential matrix.
◆ camera_fundamental
| double t_stereo_camera_calibration::camera_fundamental[3][3] |
Fundamental matrix.
◆ camera_rotation
| double t_stereo_camera_calibration::camera_rotation[3][3] |
Rotation matrix from first to second in the stereo pair.
Referenced by rift_s_create_stereo_camera_calib_rotated(), t_stereo_camera_calibration_dump(), vive_get_stereo_camera_calibration(), and wmr_hmd_create_stereo_camera_calib().
◆ camera_translation
| double t_stereo_camera_calibration::camera_translation[3] |
Translation from first to second in the stereo pair.
Referenced by rift_s_create_stereo_camera_calib_rotated(), t_stereo_camera_calibration_dump(), vive_get_stereo_camera_calibration(), and wmr_hmd_create_stereo_camera_calib().
◆ reference
| struct xrt_reference t_stereo_camera_calibration::reference |
Ref counting.
Referenced by t_stereo_camera_calibration_reference().
◆ view
| struct t_camera_calibration t_stereo_camera_calibration::view[2] |
Calibration of individual views/sensor.
Referenced by rift_s_create_stereo_camera_calib_rotated(), t_stereo_camera_calibration_alloc(), t_stereo_camera_calibration_dump(), vive_get_stereo_camera_calibration(), and wmr_hmd_create_stereo_camera_calib().
The documentation for this struct was generated from the following file:
- auxiliary/tracking/t_tracking.h