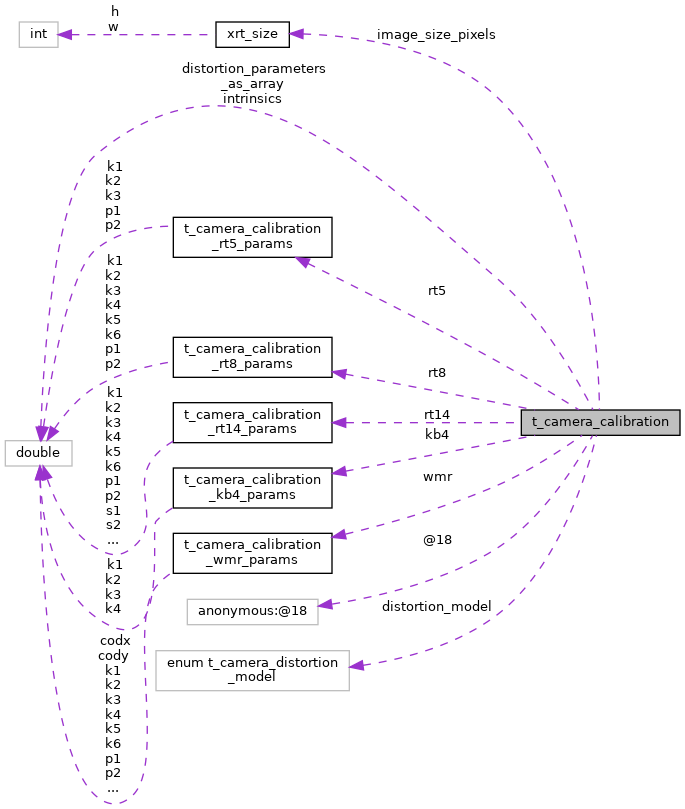
Essential calibration data for a single camera, or single lens/sensor of a stereo camera. More...
#include <tracking/t_tracking.h>
Data Fields | ||
| struct xrt_size | image_size_pixels | |
| Source image size. | ||
| double | intrinsics [3][3] | |
| Camera intrinsics matrix. | ||
| union { | ||
| struct t_camera_calibration_rt5_params rt5 | ||
| struct t_camera_calibration_rt8_params rt8 | ||
| struct t_camera_calibration_rt14_params rt14 | ||
| struct t_camera_calibration_kb4_params kb4 | ||
| struct t_camera_calibration_wmr_params wmr | ||
| double distortion_parameters_as_array [(14)] | ||
| }; | ||
| enum t_camera_distortion_model | distortion_model | |
| Distortion model that this camera uses. | ||
Related Symbols | |
(Note that these are not member symbols.) | |
| void | t_camera_calibration_dump (struct t_camera_calibration *c) |
| Small helper function that dumps one camera calibration data to logging. | |
| void | t_inertial_calibration_dump (struct t_inertial_calibration *c) |
| Prints a t_inertial_calibration struct. | |
| void | t_imu_calibration_dump (struct t_imu_calibration *c) |
| Small helper function that dumps the imu calibration data to logging. | |
Detailed Description
Essential calibration data for a single camera, or single lens/sensor of a stereo camera.
Field Documentation
◆ distortion_model
| enum t_camera_distortion_model t_camera_calibration::distortion_model |
Distortion model that this camera uses.
Referenced by xrt::auxiliary::tracking::CameraCalibrationWrapper::isDataStorageValid(), t_camera_model_params_from_t_camera_calibration(), t_stereo_camera_calibration::t_stereo_camera_calibration_alloc(), and t_stereo_camera_calibration::t_stereo_camera_calibration_from_json_v2().
◆ image_size_pixels
| struct xrt_size t_camera_calibration::image_size_pixels |
Source image size.
Referenced by xrt::auxiliary::tracking::calibration_get_undistort_map(), and t_camera_calibration_dump().
◆ intrinsics
| double t_camera_calibration::intrinsics[3][3] |
Camera intrinsics matrix.
Referenced by xrt::auxiliary::tracking::CameraCalibrationWrapper::isDataStorageValid(), t_camera_calibration_dump(), and t_camera_model_params_from_t_camera_calibration().
The documentation for this struct was generated from the following file:
- auxiliary/tracking/t_tracking.h