Loading...
Searching...
No Matches
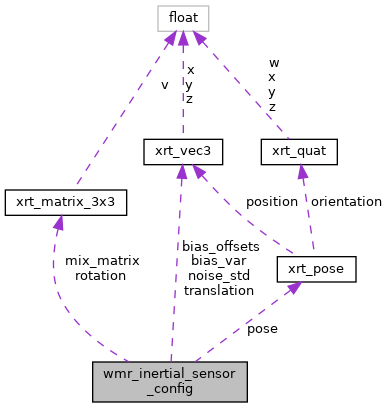
wmr_inertial_sensor_config Struct Reference
Collaboration diagram for wmr_inertial_sensor_config:
Data Fields | |
| struct xrt_vec3 | translation |
| Raw translation (to HT0). | |
| struct xrt_matrix_3x3 | rotation |
| Raw rotation (to HT0), row major. | |
| struct xrt_pose | pose |
Pose from translation and rotation | |
| struct xrt_vec3 | bias_offsets |
| struct xrt_matrix_3x3 | mix_matrix |
| struct xrt_vec3 | bias_var |
| Bias random walk variance. | |
| struct xrt_vec3 | noise_std |
| Measurement noise standard deviation. | |
Field Documentation
◆ bias_var
| struct xrt_vec3 wmr_inertial_sensor_config::bias_var |
Bias random walk variance.
- See also
- slam_tracker::inertial_calibration.
◆ noise_std
| struct xrt_vec3 wmr_inertial_sensor_config::noise_std |
Measurement noise standard deviation.
- See also
- slam_tracker::inertial_calibration.
◆ pose
| struct xrt_pose wmr_inertial_sensor_config::pose |
Pose from translation and rotation
Referenced by wmr_config_precompute_transforms(), wmr_hmd_config_init_defaults(), and wmr_hmd_fill_slam_cams_calibration().
◆ rotation
| struct xrt_matrix_3x3 wmr_inertial_sensor_config::rotation |
Raw rotation (to HT0), row major.
◆ translation
| struct xrt_vec3 wmr_inertial_sensor_config::translation |
Raw translation (to HT0).
Usually non-zero only on accelerometers.
The documentation for this struct was generated from the following file:
- drivers/wmr/wmr_config.h