Loading...
Searching...
No Matches
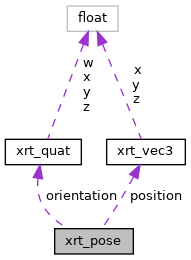
xrt_pose Struct Reference
A pose composed of a position and orientation. More...
#include <xrt/xrt_defines.h>
Collaboration diagram for xrt_pose:
Data Fields | |
| struct xrt_quat | orientation |
| struct xrt_vec3 | position |
Related Symbols | |
(Note that these are not member symbols.) | |
| void | math_pose_identity (struct xrt_pose *pose) |
| Somewhat laboriously make an xrt_pose identity. | |
| bool | math_pose_validate (const struct xrt_pose *pose) |
| Check if this pose can be used in transformation operations. | |
| void | math_pose_invert (const struct xrt_pose *pose, struct xrt_pose *outPose) |
| Invert pose. | |
| void | math_pose_from_isometry (const struct xrt_matrix_4x4 *transform, struct xrt_pose *result) |
| Converts a (col-major) isometry into a pose. | |
| void | math_pose_interpolate (const struct xrt_pose *a, const struct xrt_pose *b, float t, struct xrt_pose *outPose) |
Interpolated pose between poses a and b by lerping position and slerping orientation by t. | |
| void | math_pose_transform (const struct xrt_pose *transform, const struct xrt_pose *pose, struct xrt_pose *outPose) |
| Apply a rigid-body transformation to a pose. | |
| void | math_pose_transform_point (const struct xrt_pose *transform, const struct xrt_vec3 *point, struct xrt_vec3 *out_point) |
| Apply a rigid-body transformation to a point. | |
| void | math_pose_convert_opencv (const struct xrt_pose *in, struct xrt_pose *out) |
| Convert a pose from the OpenCV coordinate system to the OpenXR coordinate system. | |
| #define | XRT_POSE_IDENTITY {XRT_QUAT_IDENTITY, XRT_VEC3_ZERO} |
| Identity value for xrt_pose. | |
Detailed Description
A pose composed of a position and orientation.
- See also
- xrt_qaut
- xrt_vec3
Friends And Related Symbol Documentation
◆ XRT_POSE_IDENTITY
|
related |
Identity value for xrt_pose.
Referenced by get_offset_or_ident_read_locked(), get_pose(), m_space_relation_ident(), psvr2_hmd_create(), r_create_devices(), sample_hmd_create(), sdl_device_init(), sdl_system_devices_init(), survive_controller_get_hand_tracking(), t_builder_create_space_overseer_legacy(), u_device_get_view_pose(), vive_poses_get_pose_offset(), and wmr_hmd_create().
The documentation for this struct was generated from the following files:
- xrt/xrt_defines.h
- auxiliary/math/m_api.h