Driver code to read WMR config blocks. More...
#include "math/m_api.h"#include "util/u_debug.h"#include "util/u_misc.h"#include "util/u_json.h"#include "wmr_config.h"#include <assert.h>#include <string.h>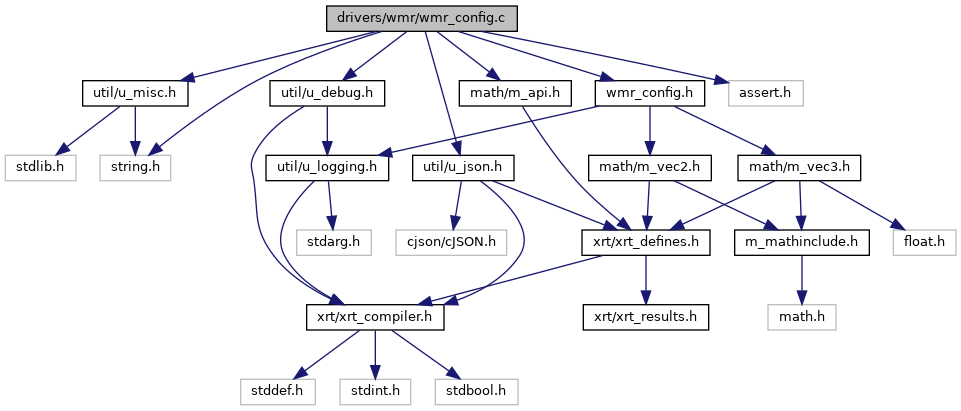
Macros | |
| #define | WMR_TRACE(log_level, ...) U_LOG_IFL_T(log_level, __VA_ARGS__) |
| #define | WMR_DEBUG(log_level, ...) U_LOG_IFL_D(log_level, __VA_ARGS__) |
| #define | WMR_INFO(log_level, ...) U_LOG_IFL_I(log_level, __VA_ARGS__) |
| #define | WMR_WARN(log_level, ...) U_LOG_IFL_W(log_level, __VA_ARGS__) |
| #define | WMR_ERROR(log_level, ...) U_LOG_IFL_E(log_level, __VA_ARGS__) |
| #define | JSON_INT(a, b, c) u_json_get_int(u_json_get(a, b), c) |
| #define | JSON_FLOAT(a, b, c) u_json_get_float(u_json_get(a, b), c) |
| #define | JSON_DOUBLE(a, b, c) u_json_get_double(u_json_get(a, b), c) |
| #define | JSON_VEC3(a, b, c) u_json_get_vec3_array(u_json_get(a, b), c) |
| #define | JSON_MATRIX_3X3(a, b, c) u_json_get_matrix_3x3(u_json_get(a, b), c) |
| #define | JSON_STRING(a, b, c) u_json_get_string_into_array(u_json_get(a, b), c, sizeof(c)) |
Functions | |
| static void | wmr_hmd_config_init_defaults (struct wmr_hmd_config *c) |
| Specifies the maximum number of cameras to use for SLAM tracking. | |
| static struct xrt_pose | pose_from_rt (const struct xrt_matrix_3x3 rotation_rm, const struct xrt_vec3 translation) |
| static bool | wmr_config_parse_display (struct wmr_hmd_config *c, cJSON *display, enum u_logging_level log_level) |
| static bool | wmr_inertial_sensor_config_parse (struct wmr_inertial_sensor_config *c, cJSON *sensor, enum u_logging_level log_level) |
| static bool | wmr_inertial_sensors_config_parse (struct wmr_inertial_sensors_config *c, cJSON *sensor, enum u_logging_level log_level) |
| static bool | wmr_config_parse_camera_config (struct wmr_hmd_config *c, cJSON *camera, enum u_logging_level log_level) |
| static bool | wmr_config_parse_calibration (struct wmr_hmd_config *c, cJSON *calib_info, enum u_logging_level log_level) |
| static bool | wmr_controller_led_config_parse (struct wmr_led_config *l, int index, const cJSON *led_json, enum u_logging_level log_level) |
| bool | wmr_hmd_config_parse (struct wmr_hmd_config *c, char *json_string, enum u_logging_level log_level) |
| static void | wmr_controller_config_init_defaults (struct wmr_controller_config *c) |
| bool | wmr_controller_config_parse (struct wmr_controller_config *c, char *json_string, enum u_logging_level log_level) |
| void | wmr_config_precompute_transforms (struct wmr_inertial_sensors_config *sensors, struct wmr_distortion_eye_config *eye_params) |
| Precompute transforms to convert between OpenXR and WMR coordinate systems. | |
Detailed Description
Driver code to read WMR config blocks.
Function Documentation
◆ wmr_config_precompute_transforms()
| void wmr_config_precompute_transforms | ( | struct wmr_inertial_sensors_config * | sensors, |
| struct wmr_distortion_eye_config * | eye_params | ||
| ) |
Precompute transforms to convert between OpenXR and WMR coordinate systems.
OpenXR: X: Right, Y: Up, Z: Backward WMR: X: Right, Y: Down, Z: Forward ┌────────────────────┐ │ OXR WMR │ │ │ │ ▲ y │ │ │ ▲ z │ │ │ x │ x │ │ ├──────► ├──────► │ │ │ │ │ │ ▼ z │ │ │ ▼ y │ └────────────────────┘
References xrt_pose::math_pose_identity(), xrt_pose::math_pose_interpolate(), xrt_pose::math_pose_invert(), xrt_pose::math_pose_transform(), wmr_sensor_transforms_config::P_ht0_me, wmr_sensor_transforms_config::P_imu_me, wmr_sensor_transforms_config::P_oxr_acc, wmr_sensor_transforms_config::P_oxr_gyr, and wmr_inertial_sensor_config::pose.
Referenced by wmr_hmd_create().
◆ wmr_hmd_config_init_defaults()
|
static |
Specifies the maximum number of cameras to use for SLAM tracking.
References math_matrix_3x3_identity(), wmr_distortion_eye_config::pose, and wmr_inertial_sensor_config::pose.