Loading...
Searching...
No Matches
t_imu_fusion.hpp File Reference
C++ sensor fusion/filtering code that uses flexkalman. More...
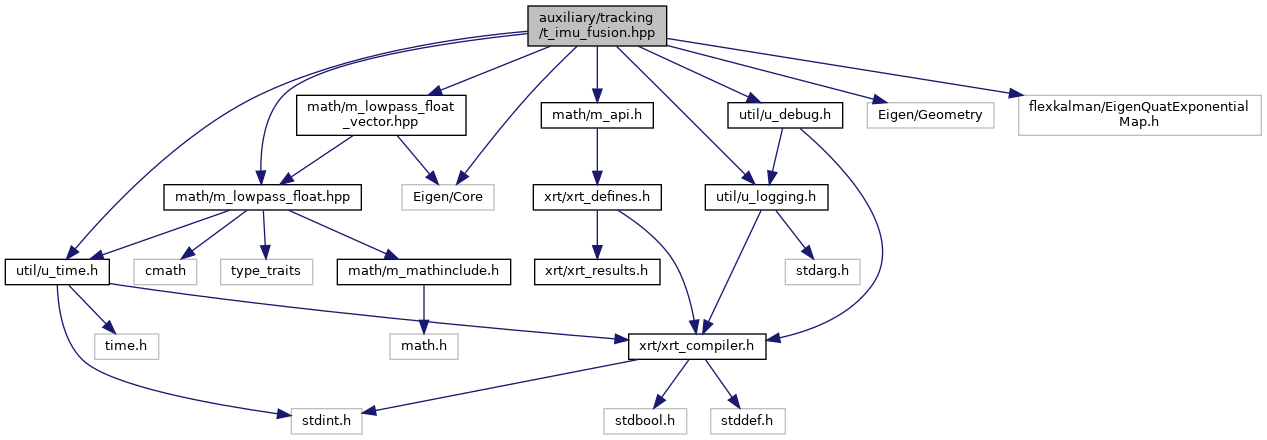
#include "math/m_lowpass_float.hpp"#include "math/m_lowpass_float_vector.hpp"#include "math/m_api.h"#include "util/u_time.h"#include "util/u_debug.h"#include "util/u_logging.h"#include <Eigen/Core>#include <Eigen/Geometry>#include "flexkalman/EigenQuatExponentialMap.h"
Include dependency graph for t_imu_fusion.hpp:
Go to the source code of this file.
Data Structures | |
| class | xrt::auxiliary::tracking::SimpleIMUFusion |
| A simple IMU fusion class. More... | |
Macros | |
| #define | SIMPLE_IMU_TRACE(...) U_LOG_IFL_T(log_level, __VA_ARGS__) |
| #define | SIMPLE_IMU_DEBUG(...) U_LOG_IFL_D(log_level, __VA_ARGS__) |
| #define | SIMPLE_IMU_INFO(...) U_LOG_IFL_I(log_level, __VA_ARGS__) |
| #define | SIMPLE_IMU_WARN(...) U_LOG_IFL_W(log_level, __VA_ARGS__) |
| #define | SIMPLE_IMU_ERROR(...) U_LOG_IFL_E(log_level, __VA_ARGS__) |
Detailed Description
C++ sensor fusion/filtering code that uses flexkalman.