Loading...
Searching...
No Matches
ulv5_driver.cpp File Reference
Driver for Ultraleap's V5 API for the Leap Motion Controller. More...
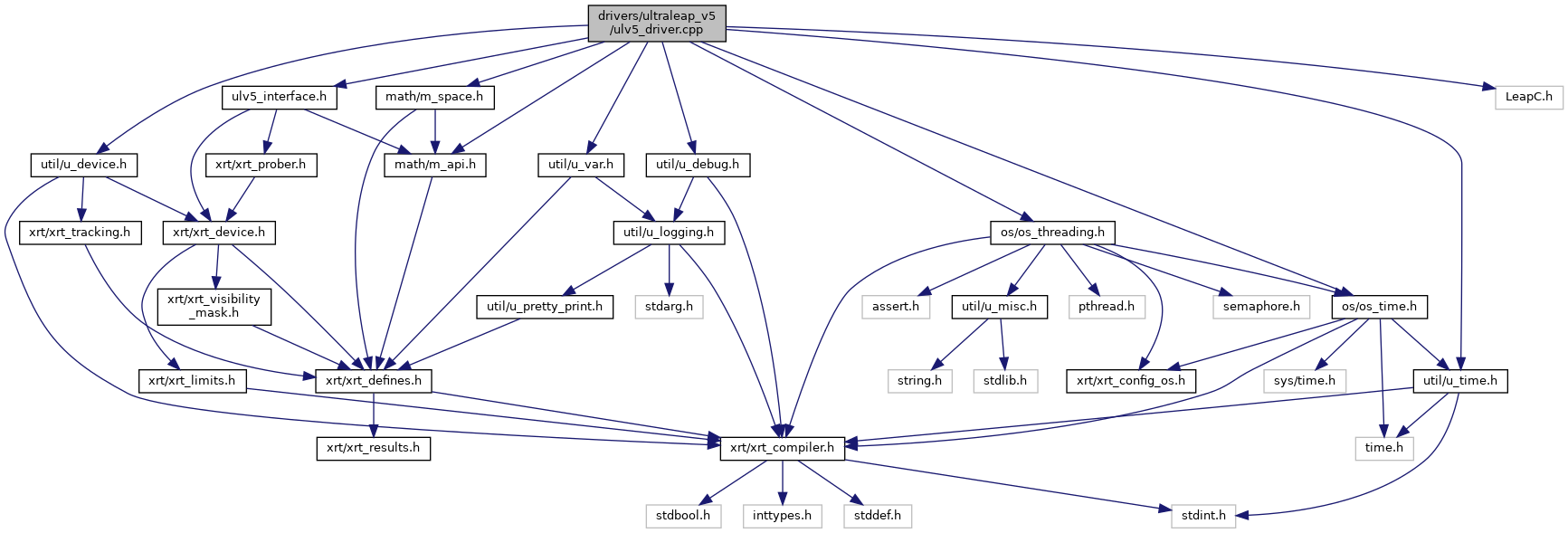
#include "ulv5_interface.h"#include "util/u_device.h"#include "util/u_var.h"#include "util/u_debug.h"#include "math/m_space.h"#include "math/m_api.h"#include "util/u_time.h"#include "os/os_time.h"#include "os/os_threading.h"#include "LeapC.h"
Include dependency graph for ulv5_driver.cpp:
Data Structures | |
| struct | ulv5_device |
Macros | |
| #define | ULV5_TRACE(ulv5d, ...) U_LOG_XDEV_IFL_T(&ulv5d->base, ulv5d->log_level, __VA_ARGS__) |
| #define | ULV5_DEBUG(ulv5d, ...) U_LOG_XDEV_IFL_D(&ulv5d->base, ulv5d->log_level, __VA_ARGS__) |
| #define | ULV5_INFO(ulv5d, ...) U_LOG_XDEV_IFL_I(&ulv5d->base, ulv5d->log_level, __VA_ARGS__) |
| #define | ULV5_WARN(ulv5d, ...) U_LOG_XDEV_IFL_W(&ulv5d->base, ulv5d->log_level, __VA_ARGS__) |
| #define | ULV5_ERROR(ulv5d, ...) U_LOG_XDEV_IFL_E(&ulv5d->base, ulv5d->log_level, __VA_ARGS__) |
| #define | joint_set(y) &joint_set.values.hand_joint_set_default[XRT_HAND_JOINT_##y] |
Functions | |
| const char * | leap_result_to_string (eLeapRS result) |
| struct ulv5_device * | ulv5_device (struct xrt_device *xdev) |
| static xrt_result_t | ulv5_device_get_hand_tracking (struct xrt_device *xdev, enum xrt_input_name name, int64_t at_timestamp_ns, struct xrt_hand_joint_set *out_value, int64_t *out_timestamp_ns) |
| static void | ulv5_device_destroy (struct xrt_device *xdev) |
| static void | ulv5_process_joint (LEAP_VECTOR joint_pos, LEAP_QUATERNION joint_orientation, float width, struct xrt_hand_joint_value *joint) |
| static void | ulv5_process_hand (LEAP_HAND hand, struct ulv5_device *ulv5d, int handedness) |
| static void * | leap_input_loop (void *ptr_to_xdev) |
| xrt_result_t | ulv5_create_device (struct xrt_device **out_xdev) |
| Probing function for Leap Motion Controller. | |
Variables | |
| static enum xrt_space_relation_flags | valid_flags |
Detailed Description
Driver for Ultraleap's V5 API for the Leap Motion Controller.
Variable Documentation
◆ valid_flags
|
static |
Initial value:
= (enum xrt_space_relation_flags)(
XRT_SPACE_RELATION_ORIENTATION_VALID_BIT | XRT_SPACE_RELATION_ORIENTATION_TRACKED_BIT |
XRT_SPACE_RELATION_POSITION_VALID_BIT | XRT_SPACE_RELATION_POSITION_TRACKED_BIT)
xrt_space_relation_flags
Flags of which components of a xrt_space_relation is valid.
Definition xrt_defines.h:655