Loading...
Searching...
No Matches
m_base.cpp File Reference
Base implementations for math library. More...
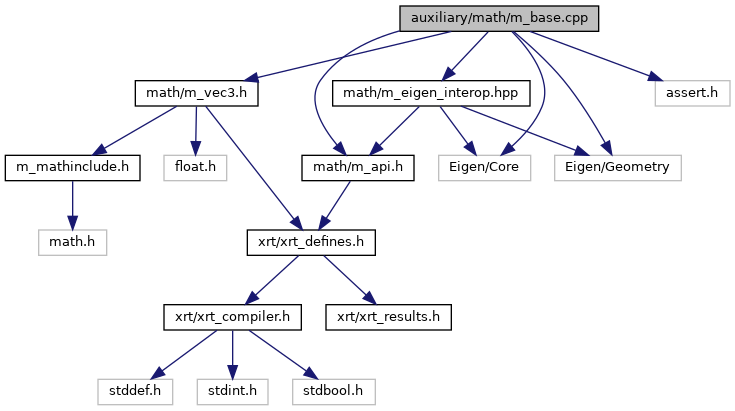
#include "math/m_api.h"#include "math/m_eigen_interop.hpp"#include "math/m_vec3.h"#include <Eigen/Core>#include <Eigen/Geometry>#include <assert.h>
Include dependency graph for m_base.cpp:
Functions | |
| static Eigen::Quaternionf | copy (const struct xrt_quat &q) |
| static Eigen::Quaternionf | copy (const struct xrt_quat *q) |
| static XRT_MAYBE_UNUSED Eigen::Quaterniond | copyd (const struct xrt_quat &q) |
| static XRT_MAYBE_UNUSED Eigen::Quaterniond | copyd (const struct xrt_quat *q) |
| static Eigen::Vector3f | copy (const struct xrt_vec3 &v) |
| static Eigen::Vector3f | copy (const struct xrt_vec3 *v) |
| static Eigen::Vector3d | copy (const struct xrt_vec3_f64 &v) |
| static Eigen::Vector3d | copy (const struct xrt_vec3_f64 *v) |
| static XRT_MAYBE_UNUSED Eigen::Vector3d | copyd (const struct xrt_vec3 &v) |
| static XRT_MAYBE_UNUSED Eigen::Vector3d | copyd (const struct xrt_vec3 *v) |
| static Eigen::Matrix3f | copy (const struct xrt_matrix_3x3 *m) |
| static Eigen::Matrix4f | copy (const struct xrt_matrix_4x4 *m) |
| bool | math_vec3_validate (const struct xrt_vec3 *vec3) |
| void | math_vec3_accum (const struct xrt_vec3 *additional, struct xrt_vec3 *inAndOut) |
| void | math_vec3_subtract (const struct xrt_vec3 *subtrahend, struct xrt_vec3 *inAndOut) |
| void | math_vec3_scalar_mul (float scalar, struct xrt_vec3 *inAndOut) |
| void | math_vec3_cross (const struct xrt_vec3 *l, const struct xrt_vec3 *r, struct xrt_vec3 *result) |
| void | math_vec3_normalize (struct xrt_vec3 *in) |
| void | math_vec3_translation_from_isometry (const struct xrt_matrix_4x4 *transform, struct xrt_vec3 *result) |
| void | math_vec3_f64_cross (const struct xrt_vec3_f64 *l, const struct xrt_vec3_f64 *r, struct xrt_vec3_f64 *result) |
| void | math_vec3_f64_normalize (struct xrt_vec3_f64 *in) |
| void | math_quat_from_angle_vector (float angle_rads, const struct xrt_vec3 *vector, struct xrt_quat *result) |
| void | math_quat_from_euler_angles (const struct xrt_vec3 *angles, struct xrt_quat *result) |
| void | math_quat_to_euler_angles (const struct xrt_quat *quat, struct xrt_vec3 *euler_angles) |
| void | math_quat_from_matrix_3x3 (const struct xrt_matrix_3x3 *mat, struct xrt_quat *result) |
| void | math_quat_from_plus_x_z (const struct xrt_vec3 *plus_x, const struct xrt_vec3 *plus_z, struct xrt_quat *result) |
| void | math_quat_from_vec_a_to_vec_b (const struct xrt_vec3 *vec_a, const struct xrt_vec3 *vec_b, struct xrt_quat *result) |
| static bool | quat_validate (const float precision, const struct xrt_quat *quat) |
| bool | math_quat_validate (const struct xrt_quat *quat) |
| bool | math_quat_is_identity (const struct xrt_quat *quat, float epsilon) |
| bool | math_quat_validate_within_1_percent (const struct xrt_quat *quat) |
| void | math_quat_invert (const struct xrt_quat *quat, struct xrt_quat *out_quat) |
| float | math_quat_len (const struct xrt_quat *quat) |
| void | math_quat_normalize (struct xrt_quat *inout) |
| bool | math_quat_ensure_normalized (struct xrt_quat *inout) |
| void | math_quat_rotate (const struct xrt_quat *left, const struct xrt_quat *right, struct xrt_quat *result) |
| void | math_quat_unrotate (const struct xrt_quat *left, const struct xrt_quat *right, struct xrt_quat *result) |
| void | math_quat_rotate_vec3 (const struct xrt_quat *left, const struct xrt_vec3 *right, struct xrt_vec3 *result) |
| void | math_quat_rotate_derivative (const struct xrt_quat *quat, const struct xrt_vec3 *deriv, struct xrt_vec3 *result) |
| void | math_quat_slerp (const struct xrt_quat *left, const struct xrt_quat *right, float t, struct xrt_quat *result) |
| void | math_quat_from_swing (const struct xrt_vec2 *swing, struct xrt_quat *result) |
| void | math_quat_from_swing_twist (const struct xrt_vec2 *swing, const float twist, struct xrt_quat *result) |
| void | math_quat_decompose_swing_twist (const struct xrt_quat *in, const struct xrt_vec3 *twist_axis, struct xrt_quat *swing, struct xrt_quat *twist) |
| void | math_matrix_3x3_identity (struct xrt_matrix_3x3 *mat) |
| Initialize a 3x3 matrix to the identity matrix. | |
| void | math_matrix_3x3_from_quat (const struct xrt_quat *q, struct xrt_matrix_3x3 *result_out) |
| Initialize a 3x3 matrix from a quaternion. | |
| void | math_matrix_3x3_f64_identity (struct xrt_matrix_3x3_f64 *mat) |
| Initialize a double 3x3 matrix to the identity matrix. | |
| void | math_matrix_3x3_f64_transform_vec3_f64 (const struct xrt_matrix_3x3_f64 *left, const struct xrt_vec3_f64 *right, struct xrt_vec3_f64 *result_out) |
| Transform a double vec3 by a 3x3 double matrix. | |
| void | math_matrix_3x3_f64_from_plus_x_z (const struct xrt_vec3_f64 *plus_x, const struct xrt_vec3_f64 *plus_z, struct xrt_matrix_3x3_f64 *result) |
| void | math_matrix_3x3_rotation_from_isometry (const struct xrt_matrix_4x4 *isometry, struct xrt_matrix_3x3 *result) |
| void | math_matrix_3x3_transform_vec3 (const struct xrt_matrix_3x3 *left, const struct xrt_vec3 *right, struct xrt_vec3 *result_out) |
| Transform a vec3 by a 3x3 matrix. | |
| void | math_matrix_4x4_transform_vec3 (const struct xrt_matrix_4x4 *left, const struct xrt_vec3 *right, struct xrt_vec3 *result_out) |
| Transform a vec3 by a 4x4 matrix, extending the vector with w = 1.0. | |
| void | math_matrix_3x3_multiply (const struct xrt_matrix_3x3 *left, const struct xrt_matrix_3x3 *right, struct xrt_matrix_3x3 *result_out) |
| void | math_matrix_3x3_inverse (const struct xrt_matrix_3x3 *in, struct xrt_matrix_3x3 *result) |
| void | math_matrix_3x3_transpose (const struct xrt_matrix_3x3 *in, struct xrt_matrix_3x3 *result) |
| void | math_matrix_4x4_identity (struct xrt_matrix_4x4 *result) |
| void | math_matrix_4x4_multiply (const struct xrt_matrix_4x4 *left, const struct xrt_matrix_4x4 *right, struct xrt_matrix_4x4 *result) |
| void | math_matrix_4x4_inverse (const struct xrt_matrix_4x4 *in, struct xrt_matrix_4x4 *result) |
| void | math_matrix_4x4_transpose (const struct xrt_matrix_4x4 *in, struct xrt_matrix_4x4 *result) |
| void | math_matrix_4x4_isometry_inverse (const struct xrt_matrix_4x4 *in, struct xrt_matrix_4x4 *result) |
| void | math_matrix_4x4_view_from_pose (const struct xrt_pose *pose, struct xrt_matrix_4x4 *result) |
| void | math_matrix_4x4_isometry_from_rt (const struct xrt_matrix_3x3 *rotation, const struct xrt_vec3 *translation, struct xrt_matrix_4x4 *result) |
| void | math_matrix_4x4_isometry_from_pose (const struct xrt_pose *pose, struct xrt_matrix_4x4 *result) |
| void | math_matrix_4x4_model (const struct xrt_pose *pose, const struct xrt_vec3 *size, struct xrt_matrix_4x4 *result) |
| void | math_matrix_4x4_inverse_view_projection (const struct xrt_matrix_4x4 *view, const struct xrt_matrix_4x4 *projection, struct xrt_matrix_4x4 *result) |
| void | m_mat4_f64_identity (struct xrt_matrix_4x4_f64 *result) |
| void | m_mat4_f64_invert (const struct xrt_matrix_4x4_f64 *matrix, struct xrt_matrix_4x4_f64 *result) |
| void | m_mat4_f64_multiply (const struct xrt_matrix_4x4_f64 *left, const struct xrt_matrix_4x4_f64 *right, struct xrt_matrix_4x4_f64 *result) |
| void | m_mat4_f64_orientation (const struct xrt_quat *quat, struct xrt_matrix_4x4_f64 *result) |
| void | m_mat4_f64_model (const struct xrt_pose *pose, const struct xrt_vec3 *size, struct xrt_matrix_4x4_f64 *result) |
| void | m_mat4_f64_view (const struct xrt_pose *pose, struct xrt_matrix_4x4_f64 *result) |
| bool | math_pose_validate (const struct xrt_pose *pose) |
| void | math_pose_invert (const struct xrt_pose *pose, struct xrt_pose *outPose) |
| void | math_pose_from_isometry (const struct xrt_matrix_4x4 *transform, struct xrt_pose *result) |
| void | math_pose_interpolate (const struct xrt_pose *a, const struct xrt_pose *b, float t, struct xrt_pose *outPose) |
| void | math_pose_identity (struct xrt_pose *pose) |
| static Eigen::Vector3f | transform_point (const xrt_pose &transform, const xrt_vec3 &point) |
| Return the result of transforming a point by a pose/transform. | |
| static xrt_pose | transform_pose (const xrt_pose &transform, const xrt_pose &pose) |
| Return the result of transforming a pose by a pose/transform. | |
| void | math_pose_transform (const struct xrt_pose *transform, const struct xrt_pose *pose, struct xrt_pose *outPose) |
| void | math_pose_transform_point (const struct xrt_pose *transform, const struct xrt_vec3 *point, struct xrt_vec3 *out_point) |
| void | math_pose_convert_opencv (const struct xrt_pose *in, struct xrt_pose *out) |
Detailed Description
Base implementations for math library.
Function Documentation
◆ transform_point()
|
inlinestatic |
Return the result of transforming a point by a pose/transform.
References xrt::auxiliary::math::map_vec3(), xrt::auxiliary::math::orientation(), and xrt::auxiliary::math::position().
Referenced by xrt_pose::math_pose_transform_point(), and transform_pose().
◆ transform_pose()
Return the result of transforming a pose by a pose/transform.
References xrt::auxiliary::math::orientation(), xrt::auxiliary::math::position(), and transform_point().
Referenced by xrt_pose::math_pose_transform().