Loading...
Searching...
No Matches
opengloves_device.c File Reference
OpenGloves device implementation. More...
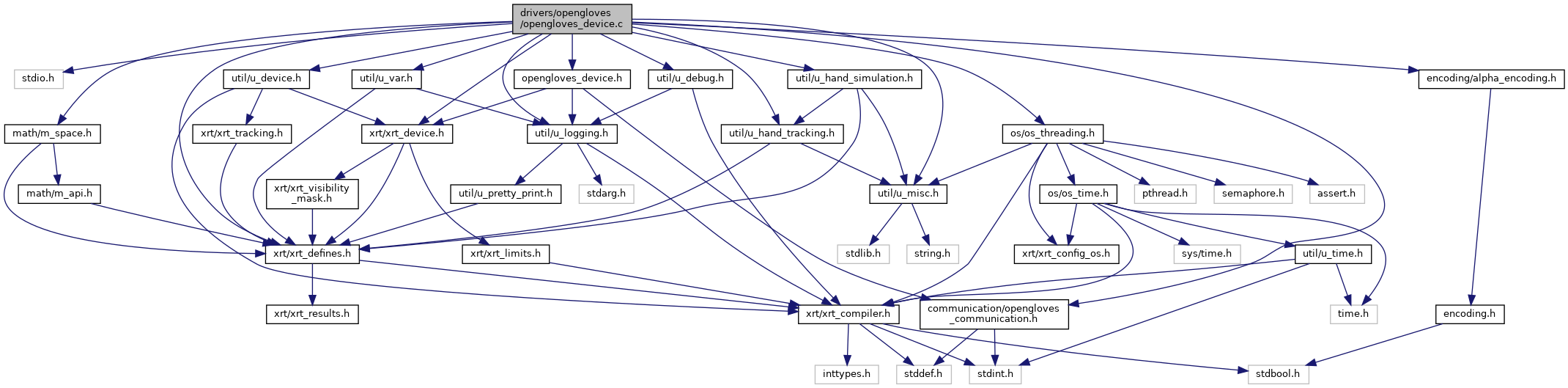
#include <stdio.h>#include "xrt/xrt_device.h"#include "xrt/xrt_defines.h"#include "math/m_space.h"#include "util/u_device.h"#include "util/u_debug.h"#include "util/u_hand_tracking.h"#include "util/u_logging.h"#include "util/u_misc.h"#include "util/u_var.h"#include "opengloves_device.h"#include "communication/opengloves_communication.h"#include "encoding/alpha_encoding.h"#include "os/os_threading.h"#include "util/u_hand_simulation.h"
Include dependency graph for opengloves_device.c:
Data Structures | |
| struct | opengloves_device |
Macros | |
| #define | OPENGLOVES_TRACE(d, ...) U_LOG_XDEV_IFL_T(&d->base, d->log_level, __VA_ARGS__) |
| #define | OPENGLOVES_DEBUG(d, ...) U_LOG_XDEV_IFL_D(&d->base, d->log_level, __VA_ARGS__) |
| #define | OPENGLOVES_INFO(d, ...) U_LOG_XDEV_IFL_I(&d->base, d->log_level, __VA_ARGS__) |
| #define | OPENGLOVES_WARN(d, ...) U_LOG_XDEV_IFL_W(&d->base, d->log_level, __VA_ARGS__) |
| #define | OPENGLOVES_ERROR(d, ...) U_LOG_XDEV_IFL_E(&d->base, d->log_level, __VA_ARGS__) |
Functions | |
| static struct opengloves_device * | opengloves_device (struct xrt_device *xdev) |
| static xrt_result_t | opengloves_device_get_hand_tracking (struct xrt_device *xdev, enum xrt_input_name name, int64_t requested_timestamp_ns, struct xrt_hand_joint_set *out_joint_set, int64_t *out_timestamp_ns) |
| static xrt_result_t | opengloves_device_update_inputs (struct xrt_device *xdev) |
| static void | opengloves_ffb_location_convert (const struct xrt_output_force_feedback *xrt_ffb, struct opengloves_output_force_feedback *out_ffb) |
| static xrt_result_t | opengloves_device_set_output (struct xrt_device *xdev, enum xrt_output_name name, const struct xrt_output_value *value) |
| static void | opengloves_device_destroy (struct xrt_device *xdev) |
| static bool | opengloves_read_next_packet (struct opengloves_device *od, char *buffer, int buffer_len) |
| Reads the next packet from the device, finishing successfully when reaching a newline Returns true if finished at a newline, or false if there was an error. | |
| static void * | opengloves_run_thread (void *ptr) |
| Main thread for reading data from the device. | |
| struct xrt_device * | opengloves_device_create (struct opengloves_communication_device *ocd, enum xrt_hand hand) |
Detailed Description
OpenGloves device implementation.
Function Documentation
◆ opengloves_read_next_packet()
|
static |
Reads the next packet from the device, finishing successfully when reaching a newline Returns true if finished at a newline, or false if there was an error.
Referenced by opengloves_run_thread().
◆ opengloves_run_thread()
|
static |
Main thread for reading data from the device.
References opengloves_read_next_packet().