Loading...
Searching...
No Matches
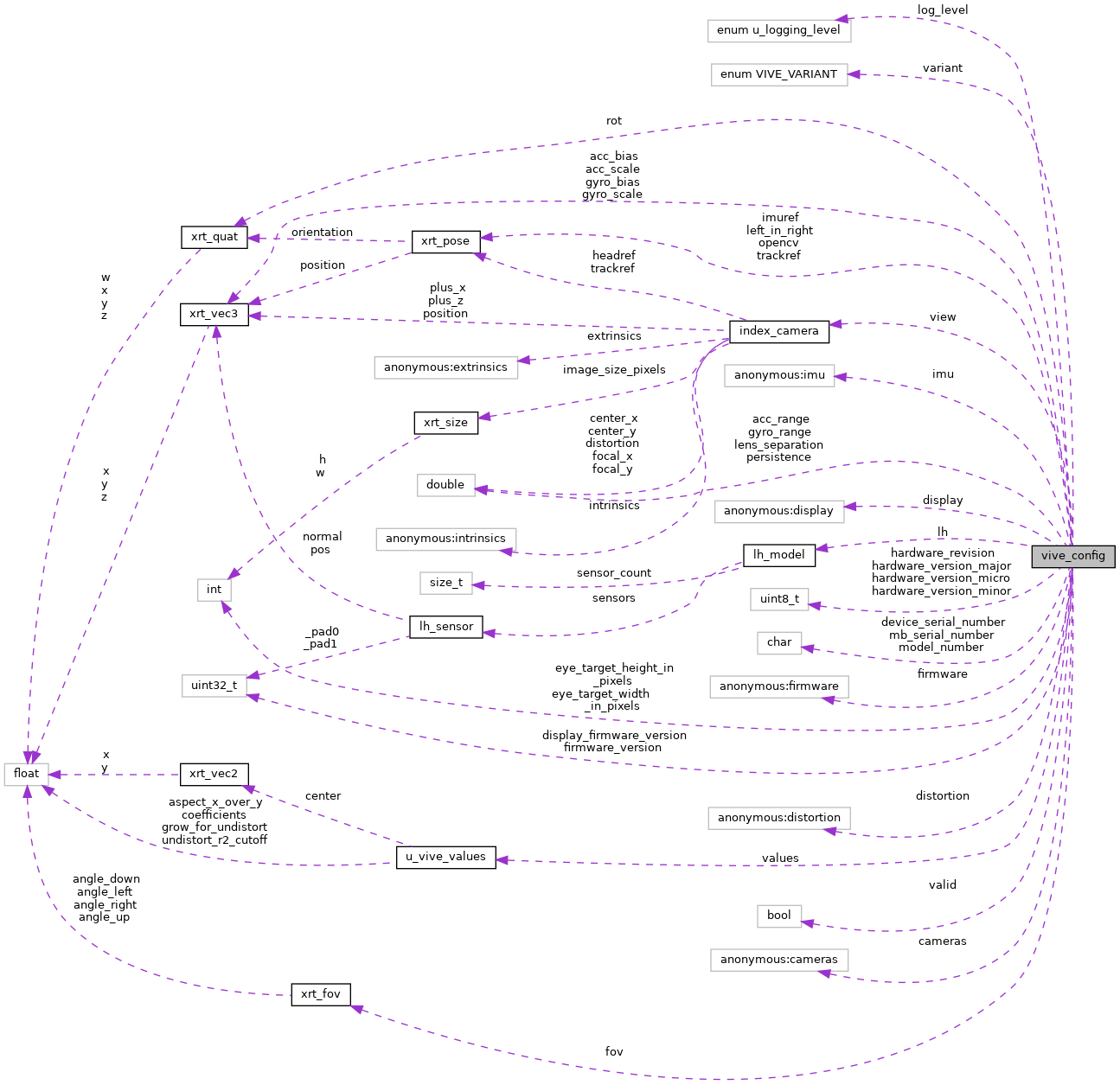
vive_config Struct Reference
headset config. More...
#include <vive/vive_config.h>
Collaboration diagram for vive_config:
Data Fields | ||
| enum u_logging_level | log_level | |
| log level accessed by the config parser | ||
| enum VIVE_VARIANT | variant | |
| struct vive_imu_properties | imu | |
| struct { | ||
| double lens_separation | ||
| double persistence | ||
| int eye_target_height_in_pixels | ||
| int eye_target_width_in_pixels | ||
| struct xrt_quat rot [2] | ||
| struct xrt_pose trackref | ||
| Head position in tracking space. More... | ||
| struct xrt_pose imuref | ||
| Head position in IMU space. More... | ||
| } | display | |
| struct { | ||
| uint32_t display_firmware_version | ||
| uint32_t firmware_version | ||
| uint8_t hardware_revision | ||
| uint8_t hardware_version_micro | ||
| uint8_t hardware_version_minor | ||
| uint8_t hardware_version_major | ||
| char mb_serial_number [32] | ||
| char model_number [32] | ||
| char device_serial_number [32] | ||
| } | firmware | |
| struct { | ||
| struct u_vive_values values [2] | ||
| struct xrt_fov fov [2] | ||
| } | distortion | |
| struct { | ||
| struct vive_index_camera view [2] | ||
| The two cameras. More... | ||
| struct xrt_pose left_in_right | ||
| Left view in right camera space. More... | ||
| struct xrt_pose opencv | ||
| The same but in OpenCV camera space. More... | ||
| bool valid | ||
| Have we loaded the config. More... | ||
| } | cameras | |
| struct vive_lh_model | lh | |
Detailed Description
headset config.
Field Documentation
◆ imuref
| struct xrt_pose vive_config::imuref |
Head position in IMU space.
Referenced by vive_config_parse().
◆ left_in_right
| struct xrt_pose vive_config::left_in_right |
Left view in right camera space.
◆ log_level
| enum u_logging_level vive_config::log_level |
log level accessed by the config parser
Referenced by vive_config_parse().
◆ opencv
| struct xrt_pose vive_config::opencv |
The same but in OpenCV camera space.
Referenced by vive_get_stereo_camera_calibration().
◆ trackref
| struct xrt_pose vive_config::trackref |
Head position in tracking space.
Referenced by precompute_sensor_transforms(), and vive_config_parse().
◆ valid
| bool vive_config::valid |
Have we loaded the config.
Referenced by vive_get_stereo_camera_calibration().
◆ view
| struct vive_index_camera vive_config::view[2] |
The two cameras.
Referenced by vive_get_slam_cams_calib(), and vive_get_stereo_camera_calibration().
The documentation for this struct was generated from the following file:
- auxiliary/vive/vive_config.h