Loading...
Searching...
No Matches
t_dead_reckoning.c File Reference
SLAM tracking code. More...
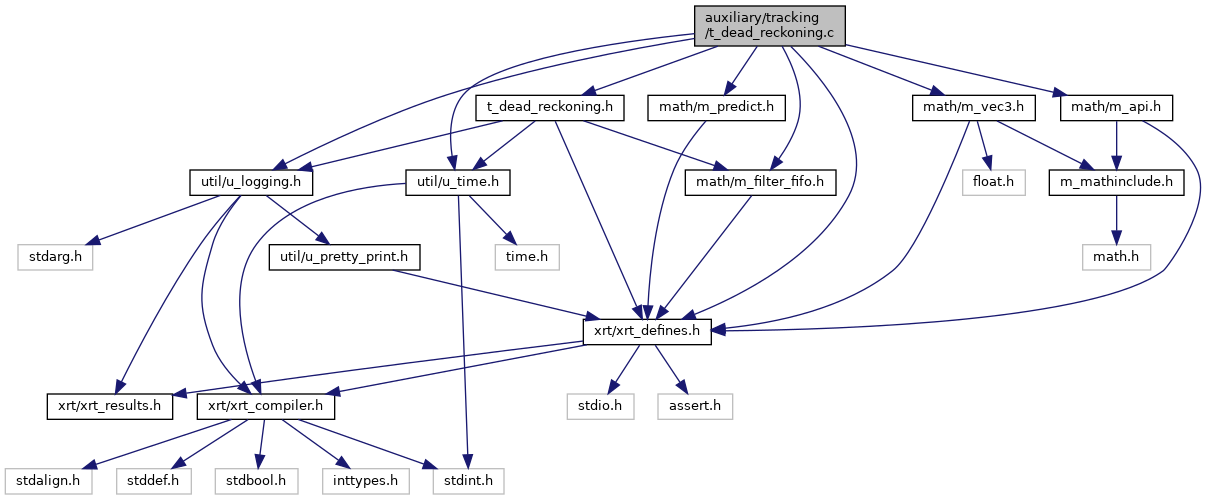
#include "xrt/xrt_defines.h"#include "util/u_logging.h"#include "util/u_time.h"#include "math/m_filter_fifo.h"#include "math/m_vec3.h"#include "math/m_predict.h"#include "math/m_api.h"#include "t_dead_reckoning.h"
Include dependency graph for t_dead_reckoning.c:
Functions | |
| bool | t_apply_dead_reckoning (struct m_ff_vec3_f32 *gyro_ff, struct m_ff_vec3_f32 *accel_ff, const struct xrt_vec3 *gravity_correction, timepoint_ns when_ns, const struct xrt_space_relation *base_rel, timepoint_ns base_rel_ts, struct xrt_space_relation *out_relation) |
| Apply dead reckoning to a base relation using IMU data from filter fifos. | |
Detailed Description
SLAM tracking code.
Function Documentation
◆ t_apply_dead_reckoning()
| bool t_apply_dead_reckoning | ( | struct m_ff_vec3_f32 * | gyro_ff, |
| struct m_ff_vec3_f32 * | accel_ff, | ||
| const struct xrt_vec3 * | gravity_correction, | ||
| timepoint_ns | when_ns, | ||
| const struct xrt_space_relation * | base_rel, | ||
| timepoint_ns | base_rel_ts, | ||
| struct xrt_space_relation * | out_relation | ||
| ) |
Apply dead reckoning to a base relation using IMU data from filter fifos.
The filter fifos should be exclusively locked and unmodified during the runtime of this function.
- Parameters
-
gyro_ff The gyro filter fifo. accel_ff The accelerometer filter fifo. Can be NULL to only use gyro. gravity_correction Gravity correction to apply to accelerometer data. Can be NULL if accel_ff is NULL. when_ns The timestamp to predict to. base_rel The base relation to start dead reckoning from. base_rel_ts The timestamp of the base relation. out_relation The predicted relation output.
- Returns
- Whether the dead reckoning succeeded, we might fail if the base relation is older than the oldest IMU sample.
- Todo:
- Instead of using same a and g values, do an interpolated sample like this:
References m_ff_vec3_f32_get(), m_ff_vec3_f32_get_timestamp(), m_predict_relation(), xrt_vec3::math_vec3_accum(), time_ns_to_s(), U_LOG_E, U_LOG_T, U_LOG_W, xrt_quat::XRT_QUAT_IDENTITY, xrt_space_relation::XRT_SPACE_RELATION_ZERO, and xrt_vec3::XRT_VEC3_ZERO.
Referenced by xrt::auxiliary::tracking::slam::predict_pose().