Loading...
Searching...
No Matches
u_hand_simulation.c File Reference
Wrapper around Mercury's parametric hand code, used by Index and OpenGloves to simulate hand tracking. More...
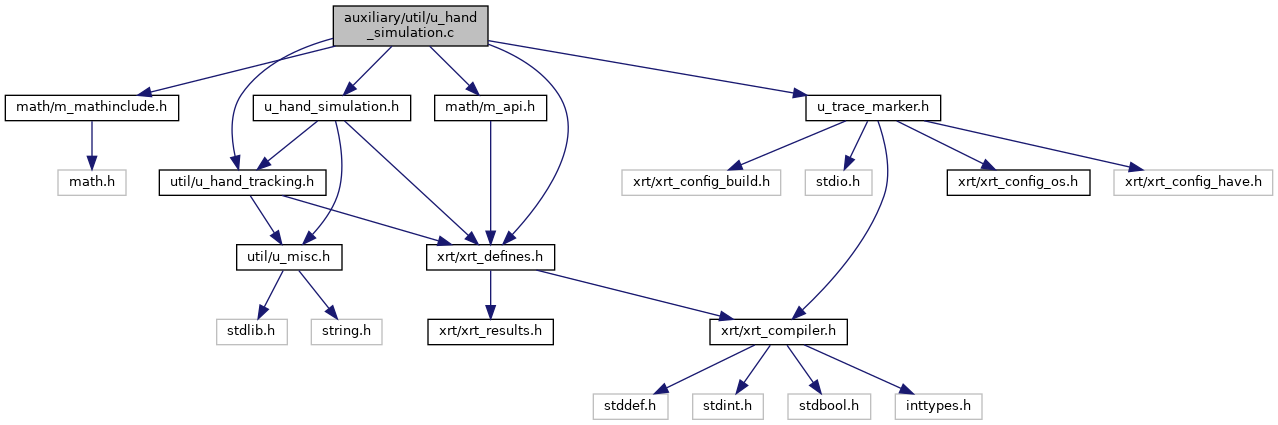
#include "math/m_mathinclude.h"#include "util/u_hand_tracking.h"#include "xrt/xrt_defines.h"#include "u_hand_simulation.h"#include "math/m_api.h"#include "u_trace_marker.h"
Include dependency graph for u_hand_simulation.c:
Data Structures | |
| struct | translations55 |
| struct | orientations54 |
Macros | |
| #define | HAND_SIM_NUM_FINGERS 5 |
| #define | HAND_SIM_NUM_JOINTS_IN_FINGER 5 |
| #define | HAND_SIM_NUM_ORIENTATIONS_IN_FINGER 4 |
| #define | assert_quat_length_1(q) |
Functions | |
| static void | eval_hand_set_rel_orientations (const struct u_hand_sim_hand *opt, struct orientations54 *rel_orientations) |
| static void | eval_hand_set_rel_translations (const struct u_hand_sim_hand *opt, struct translations55 *rel_translations) |
| void | eval_hand_with_orientation (const struct u_hand_sim_hand *opt, bool is_right, struct translations55 *translations_absolute, struct orientations54 *orientations_absolute) |
| static void | zldtt_ori_right (const struct xrt_quat *orientation, struct xrt_quat *out) |
| static void | zldtt (const struct xrt_vec3 *trans, const struct xrt_quat *orientation, bool is_right, struct xrt_space_relation *out) |
| static void | our_eval_to_viz_hand (struct u_hand_sim_hand *opt, struct translations55 *translations_absolute, struct orientations54 *orientations_absolute, bool is_right, struct xrt_hand_joint_set *out_viz_hand) |
| static void | hand_sim_hand_init (struct u_hand_sim_hand *out_opt, enum xrt_hand xhand, const struct xrt_space_relation *root_pose) |
| void | u_hand_sim_simulate (struct u_hand_sim_hand *hand_ptr, struct xrt_hand_joint_set *out_set) |
| void | u_hand_sim_simulate_for_valve_index_knuckles (const struct u_hand_tracking_curl_values *values, enum xrt_hand xhand, const struct xrt_space_relation *root_pose, struct xrt_hand_joint_set *out_set) |
| static void | u_hand_sim_apply_generic_finger_transform (const struct u_hand_tracking_finger_value *finger_value, struct u_hand_sim_finger *out_finger) |
| void | u_hand_sim_simulate_generic (const struct u_hand_tracking_values *values, enum xrt_hand xhand, const struct xrt_space_relation *root_pose, struct xrt_hand_joint_set *out_set) |
Detailed Description
Wrapper around Mercury's parametric hand code, used by Index and OpenGloves to simulate hand tracking.
Function Documentation
◆ hand_sim_hand_init()
|
static |
- Todo:
- needed?
References DEG_TO_RAD.