Loading...
Searching...
No Matches
ulv2_driver.cpp File Reference
Driver for Ultraleap's V2 API for the Leap Motion Controller. More...
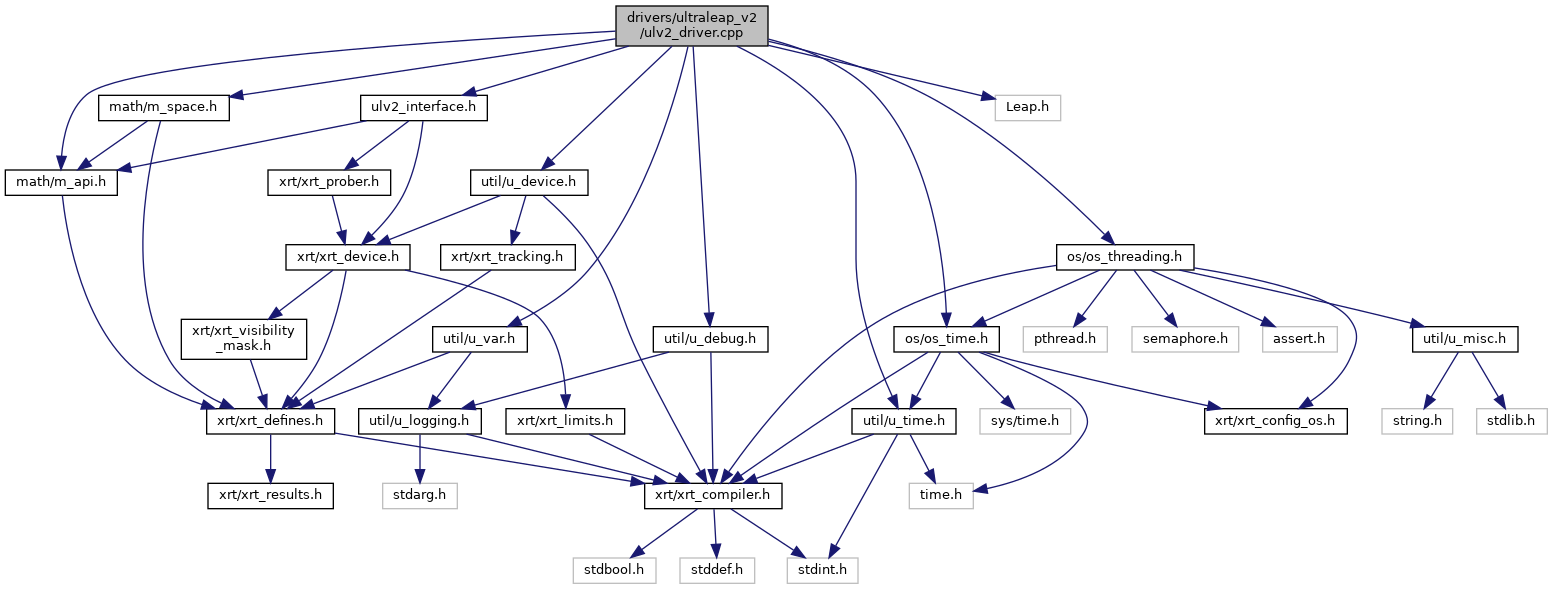
#include "ulv2_interface.h"#include "util/u_device.h"#include "util/u_var.h"#include "util/u_debug.h"#include "math/m_space.h"#include "math/m_api.h"#include "util/u_time.h"#include "os/os_time.h"#include "os/os_threading.h"#include "Leap.h"
Include dependency graph for ulv2_driver.cpp:
Data Structures | |
| struct | ulv2_device |
Macros | |
| #define | ULV2_TRACE(ulv2d, ...) U_LOG_XDEV_IFL_T(&ulv2d->base, ulv2d->log_level, __VA_ARGS__) |
| #define | ULV2_DEBUG(ulv2d, ...) U_LOG_XDEV_IFL_D(&ulv2d->base, ulv2d->log_level, __VA_ARGS__) |
| #define | ULV2_INFO(ulv2d, ...) U_LOG_XDEV_IFL_I(&ulv2d->base, ulv2d->log_level, __VA_ARGS__) |
| #define | ULV2_WARN(ulv2d, ...) U_LOG_XDEV_IFL_W(&ulv2d->base, ulv2d->log_level, __VA_ARGS__) |
| #define | ULV2_ERROR(ulv2d, ...) U_LOG_XDEV_IFL_E(&ulv2d->base, ulv2d->log_level, __VA_ARGS__) |
| #define | printf_pose(pose) |
| #define | xrtj(y) &joint_set->values.hand_joint_set_default[XRT_HAND_JOINT_##y] |
| #define | fb(y) finger.bone(y) |
| #define | prevJ(y) finger.bone(y).prevJoint() |
| #define | nextJ(y) finger.bone(y).nextJoint() |
| #define | lm Leap::Bone::TYPE_METACARPAL |
| #define | lp Leap::Bone::TYPE_PROXIMAL |
| #define | li Leap::Bone::TYPE_INTERMEDIATE |
| #define | ld Leap::Bone::TYPE_DISTAL |
Enumerations | |
| enum | leap_thread_status { THREAD_NOT_STARTED , THREAD_OK , THREAD_ERRORED_OUT } |
Functions | |
| struct ulv2_device * | ulv2_device (struct xrt_device *xdev) |
| static void | ulv2_process_joint (Leap::Vector jointpos, Leap::Matrix jointbasis, float width, int side, struct xrt_hand_joint_value *joint) |
| void | ulv2_process_hand (Leap::Hand hand, xrt_hand_joint_set *joint_set, int hi) |
| void * | leap_input_loop (void *ptr_to_xdev) |
| static void | ulv2_device_get_hand_tracking (struct xrt_device *xdev, enum xrt_input_name name, uint64_t at_timestamp_ns, struct xrt_hand_joint_set *out_value, uint64_t *out_timestamp_ns) |
| static void | ulv2_device_destroy (struct xrt_device *xdev) |
| xrt_result_t | ulv2_create_device (struct xrt_device **out_xdev) |
| Probing function for Leap Motion Controller. | |
Variables | |
| enum xrt_space_relation_flags | valid_flags |
| static int | error_time |
Detailed Description
Driver for Ultraleap's V2 API for the Leap Motion Controller.
Macro Definition Documentation
◆ printf_pose
| #define printf_pose | ( | pose | ) |
Value:
printf("%f %f %f %f %f %f %f\n", pose.position.x, pose.position.y, pose.position.z, pose.orientation.x, \
pose.orientation.y, pose.orientation.z, pose.orientation.w);
Function Documentation
◆ leap_input_loop()
| void * leap_input_loop | ( | void * | ptr_to_xdev | ) |
- Todo:
- (Moshi Turner) Could be using LeapController.now() to try to emulate our own pose prediction, but I ain't got time for that
References os_monotonic_get_ns(), os_nanosleep(), time_s_to_ns(), and U_1_000_000_000.
Referenced by ulv2_create_device(), and ulv5_create_device().
Variable Documentation
◆ valid_flags
| enum xrt_space_relation_flags valid_flags |
Initial value:
= (enum xrt_space_relation_flags)(
XRT_SPACE_RELATION_ORIENTATION_VALID_BIT | XRT_SPACE_RELATION_ORIENTATION_TRACKED_BIT |
XRT_SPACE_RELATION_POSITION_VALID_BIT | XRT_SPACE_RELATION_POSITION_TRACKED_BIT)
xrt_space_relation_flags
Flags of which components of a xrt_space_relation is valid.
Definition xrt_defines.h:655