Loading...
Searching...
No Matches
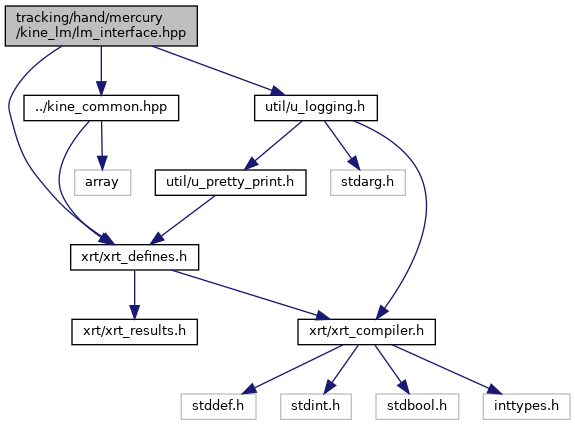
lm_interface.hpp File Reference
Interface for Levenberg-Marquardt kinematic optimizer. More...
Include dependency graph for lm_interface.hpp:
Go to the source code of this file.
Functions | |
| void | xrt::tracking::hand::mercury::lm::optimizer_create (xrt_pose left_in_right, bool is_right, u_logging_level log_level, KinematicHandLM **out_kinematic_hand) |
| void | xrt::tracking::hand::mercury::lm::optimizer_run (KinematicHandLM *hand, one_frame_input &observation, bool hand_was_untracked_last_frame, float smoothing_factor, bool optimize_hand_size, float target_hand_size, float hand_size_err_mul, float amt_use_depth, xrt_hand_joint_set &out_hand, float &out_hand_size, float &out_reprojection_error) |
| The main tracking code calls this function with some 2D(ish) camera observations of the hand, and this function calculates a good 3D hand pose and writes it to out_viz_hand. | |
| void | xrt::tracking::hand::mercury::lm::optimizer_destroy (KinematicHandLM **hand) |
Detailed Description
Interface for Levenberg-Marquardt kinematic optimizer.
Function Documentation
◆ optimizer_run()
| void xrt::tracking::hand::mercury::lm::optimizer_run | ( | KinematicHandLM * | hand, |
| one_frame_input & | observation, | ||
| bool | hand_was_untracked_last_frame, | ||
| float | smoothing_factor, | ||
| bool | optimize_hand_size, | ||
| float | target_hand_size, | ||
| float | hand_size_err_mul, | ||
| float | amt_use_depth, | ||
| xrt_hand_joint_set & | out_hand, | ||
| float & | out_hand_size, | ||
| float & | out_reprojection_error | ||
| ) |
The main tracking code calls this function with some 2D(ish) camera observations of the hand, and this function calculates a good 3D hand pose and writes it to out_viz_hand.
- Parameters
-
observation The observation of the hand joints. Warning, this function will mutate the observation unpredictably. Keep a copy of it if you need it after. hand_was_untracked_last_frame If the hand was untracked last frame (it was out of view, obscured, ML models failed, etc.) - if it was, we don't want to enforce temporal consistency because we have no good previous hand state with which to do that. optimize_hand_size Whether or not it's allowed to tweak the hand size - when we're calibrating the user's hand size, we want to do that; afterwards we don't want to waste the compute. target_hand_size The hand size we want it to get close to hand_size_err_mul A multiplier to help determine how close it has to get to that hand size [out] out_hand The xrt_hand_joint_set to output its result to [out] out_hand_size The hand size it ended up at [out] out_reprojection_error The reprojection error it ended up at
- Parameters
-
smoothing_factor - Unused if this is the first frame
References xrt::tracking::hand::mercury::lm::optimizer_run(), and xrt::tracking::hand::mercury::lm::OptimizerHandInit().
Referenced by xrt::tracking::hand::mercury::lm::optimizer_run().