Loading...
Searching...
No Matches
pose_optimize.cpp File Reference
RANSAC PnP pose refinement. More...
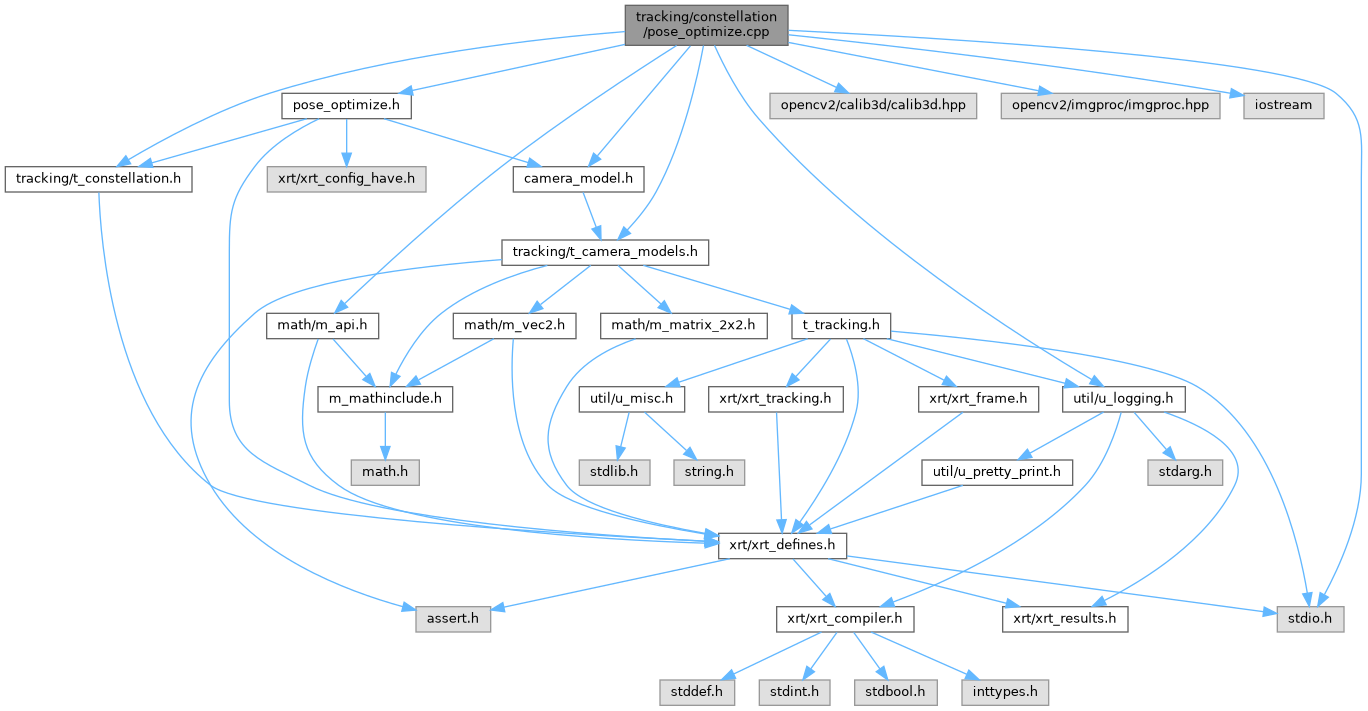
#include "util/u_logging.h"#include "tracking/t_camera_models.h"#include "tracking/t_constellation.h"#include "math/m_api.h"#include "camera_model.h"#include <opencv2/core/version.hpp>#include <opencv2/imgproc/imgproc.hpp>#include <opencv2/calib3d/calib3d.hpp>#include <iostream>#include <stdio.h>#include "pose_optimize.h"
Include dependency graph for pose_optimize.cpp:
Functions | |
| static void | undistort_blob_points (std::vector< cv::Point2f > in_points, std::vector< cv::Point2f > &out_points, struct camera_model *calib) |
| bool | ransac_pnp_pose (enum u_logging_level log_level, struct xrt_pose *pose, struct t_blob *blobs, uint32_t num_blobs, struct t_constellation_tracker_led_model *leds_model, t_constellation_device_id_t device_id, struct camera_model *calib, uint32_t *num_leds_out, uint32_t *num_inliers) |
Detailed Description
RANSAC PnP pose refinement.