Loading...
Searching...
No Matches
psvr_device.c File Reference
PSVR device implementation, imported from OpenHMD. More...
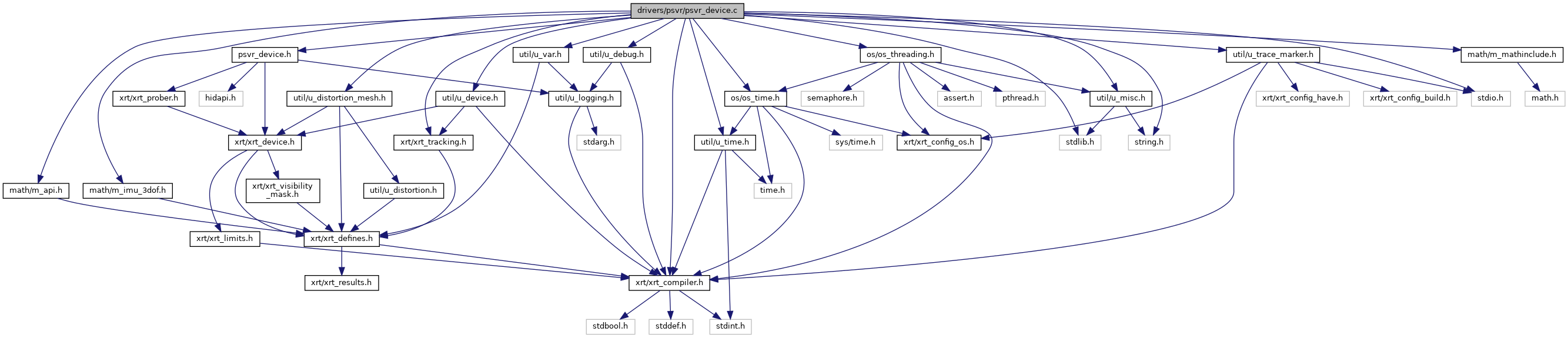
#include "xrt/xrt_compiler.h"#include "xrt/xrt_tracking.h"#include "os/os_time.h"#include "os/os_threading.h"#include "math/m_api.h"#include "util/u_var.h"#include "util/u_misc.h"#include "util/u_time.h"#include "util/u_debug.h"#include "util/u_device.h"#include "util/u_trace_marker.h"#include "util/u_distortion_mesh.h"#include "math/m_imu_3dof.h"#include "math/m_mathinclude.h"#include <stdio.h>#include <stdlib.h>#include <string.h>#include "psvr_device.h"
Include dependency graph for psvr_device.c:
Data Structures | |
| struct | psvr_device |
| Private struct for the PSVR driver device. More... | |
Macros | |
| #define | PSVR_DEBUG(p, ...) U_LOG_XDEV_IFL_D(&p->base, p->log_level, __VA_ARGS__) |
| #define | PSVR_ERROR(p, ...) U_LOG_XDEV_IFL_E(&p->base, p->log_level, __VA_ARGS__) |
| #define | FEATURE_BUFFER_SIZE 256 |
| #define | PSVR_LED_POWER_OFF ((uint8_t)0x00) |
| #define | PSVR_LED_POWER_MAX ((uint8_t)0xff) |
| #define | PSVR_LED_POWER_WIRE_OFF ((uint8_t)0) |
| #define | PSVR_LED_POWER_WIRE_MAX ((uint8_t)100) |
Functions | |
| static struct psvr_device * | psvr_device (struct xrt_device *p) |
| static int | open_hid (struct psvr_device *p, struct hid_device_info *dev_info, hid_device **out_dev) |
| static int | send_to_control (struct psvr_device *psvr, const uint8_t *data, size_t size) |
| static int | send_request_data (struct psvr_device *psvr, uint8_t id, uint8_t num) |
| static uint8_t | scale_led_power (uint8_t power) |
| static void | read_sample_and_apply_calibration (struct psvr_device *psvr, struct psvr_parsed_sample *sample, struct xrt_vec3 *out_accel, struct xrt_vec3 *out_gyro) |
| static void | update_fusion_locked (struct psvr_device *psvr, struct psvr_parsed_sample *sample, uint64_t timestamp_ns) |
| static void | update_fusion (struct psvr_device *psvr, struct psvr_parsed_sample *sample, uint64_t timestamp_ns) |
| static uint32_t | calc_delta_and_handle_rollover (uint32_t next, uint32_t last) |
| static timepoint_ns | ensure_forward_progress_timestamps (struct psvr_device *psvr, timepoint_ns timestamp_ns) |
| static void | handle_tracker_sensor_msg (struct psvr_device *psvr, unsigned char *buffer, int size) |
| static void | sensor_clear_queue (struct psvr_device *psvr) |
| static int | sensor_read_one_packet (struct psvr_device *psvr) |
| static void * | sensor_thread (void *ptr) |
| static void | handle_control_status_msg (struct psvr_device *psvr, unsigned char *buffer, int size) |
| static void | handle_device_name_msg (struct psvr_device *psvr, unsigned char *buffer, int size) |
| static void | handle_calibration_msg (struct psvr_device *psvr, const unsigned char *buffer, size_t size) |
| static void | handle_control_0x82 (struct psvr_device *psvr, unsigned char *buffer, int size) |
| static void | handle_control_0xA0 (struct psvr_device *psvr, unsigned char *buffer, int size) |
| static int | read_control_packets (struct psvr_device *psvr) |
| static int | read_calibration_data (struct psvr_device *psvr) |
| Get the device name data and calibration data, see link below for info. | |
| static int | wait_for_power (struct psvr_device *psvr, bool on) |
| static int | wait_for_vr_mode (struct psvr_device *psvr, bool on) |
| static int | control_power_and_wait (struct psvr_device *psvr, bool on) |
| static int | control_vrmode_and_wait (struct psvr_device *psvr, bool on) |
| static int | update_leds_if_changed (struct psvr_device *psvr) |
| static int | control_leds (struct psvr_device *psvr, enum psvr_leds adjust, uint8_t power, enum psvr_leds off) |
| Control the leds on the headset, allowing you to turn on and off different leds with a single call. | |
| static int | disco_leds (struct psvr_device *psvr) |
| static void | teardown (struct psvr_device *psvr) |
| static xrt_result_t | psvr_device_update_inputs (struct xrt_device *xdev) |
| static xrt_result_t | psvr_device_get_tracked_pose (struct xrt_device *xdev, enum xrt_input_name name, int64_t at_timestamp_ns, struct xrt_space_relation *out_relation) |
| static void | psvr_device_destroy (struct xrt_device *xdev) |
| static xrt_result_t | psvr_compute_distortion (struct xrt_device *xdev, uint32_t view, float u, float v, struct xrt_uv_triplet *result) |
| struct xrt_device * | psvr_device_create_auto_prober (struct hid_device_info *sensor_hid_info, struct hid_device_info *control_hid_info, struct xrt_tracked_psvr *tracker, enum u_logging_level log_level) |
Variables | |
| static XRT_MAYBE_UNUSED const unsigned char | psvr_tracking_on [12] |
Detailed Description
PSVR device implementation, imported from OpenHMD.
Function Documentation
◆ handle_device_name_msg()
|
static |
- Todo:
- Get the name here.
◆ psvr_device_get_tracked_pose()
|
static |
- Todo:
- Move this to the tracker.
References m_imu_3dof::rot, U_ZERO, XRT_ERROR_INPUT_UNSUPPORTED, XRT_INPUT_GENERIC_HEAD_POSE, and XRT_SUCCESS.
◆ read_calibration_data()
|
static |
Get the device name data and calibration data, see link below for info.
https://github.com/gusmanb/PSVRFramework/wiki/Report-0x81-Device-ID-and-Calibration
References os_nanosleep(), and U_LOG_E.
Variable Documentation
◆ psvr_tracking_on
|
static |
Initial value:
= {
0x11, 0x00, 0xaa, 0x08, 0x00, 0xff, 0xff, 0xff, 0x00, 0x00, 0x00, 0x00,
}