Loading...
Searching...
No Matches
lighthouse_system Struct Reference
Collaboration diagram for lighthouse_system:
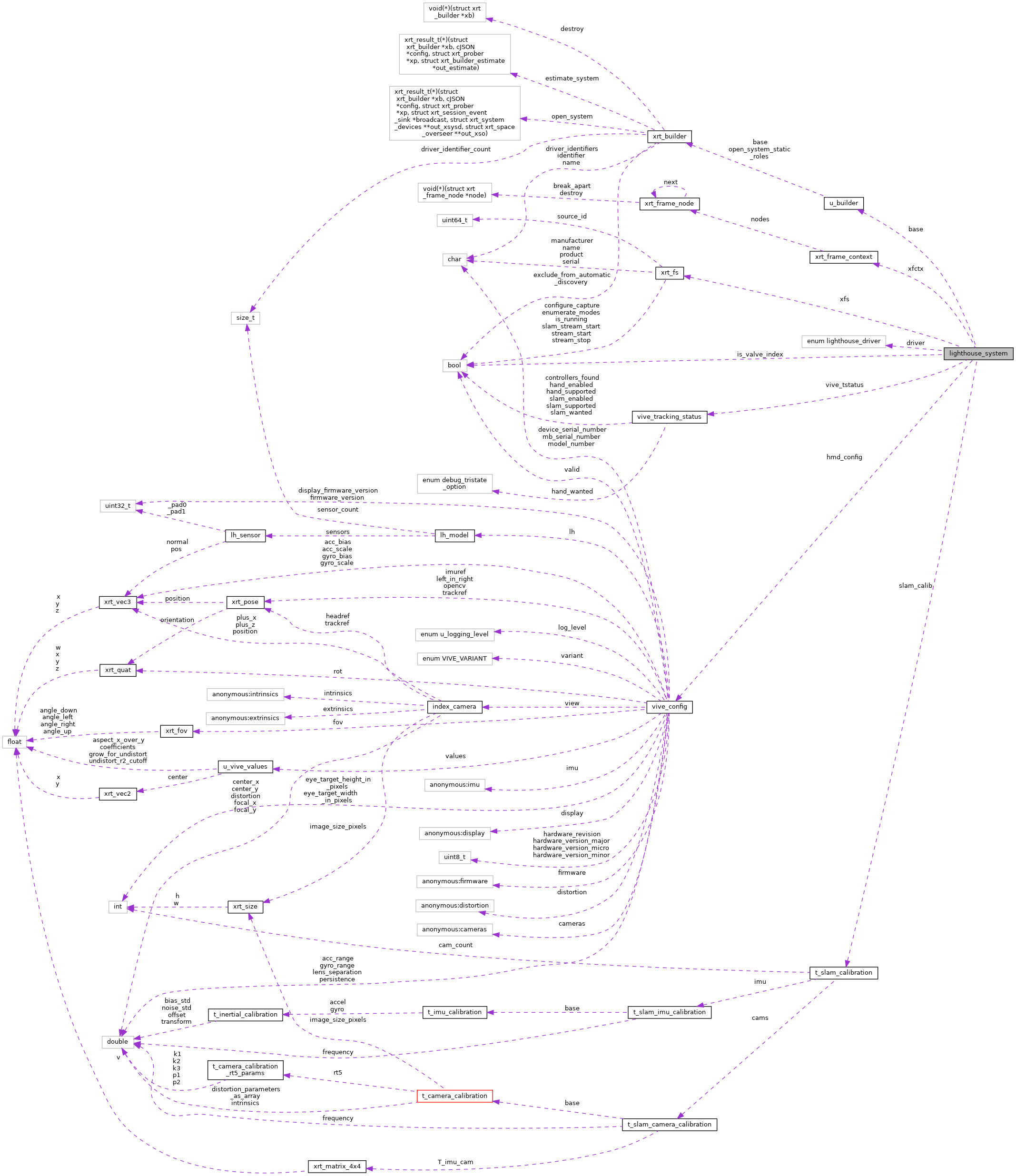
Data Fields | |
| struct t_builder | base |
| struct xrt_frame_context * | xfctx |
| enum lighthouse_driver | driver |
| Which lighthouse implementation we are using. | |
| bool | is_valve_index |
| Is our HMD a Valve Index? If so, try to set up hand-tracking and SLAM as needed. | |
| struct vive_tracking_status | vive_tstatus |
| Visual tracking status for Index under Vive driver. | |
| struct xrt_fs * | xfs |
| Frameserver for Valve Index camera, if we have one. | |
| struct vive_config * | hmd_config |
| struct t_slam_calibration | slam_calib |
| Calibration data for SLAM. | |
Field Documentation
◆ driver
| enum lighthouse_driver lighthouse_system::driver |
Which lighthouse implementation we are using.
Referenced by valve_index_setup_visual_trackers().
◆ is_valve_index
| bool lighthouse_system::is_valve_index |
Is our HMD a Valve Index? If so, try to set up hand-tracking and SLAM as needed.
◆ slam_calib
| struct t_slam_calibration lighthouse_system::slam_calib |
Calibration data for SLAM.
Referenced by valve_index_setup_visual_trackers().
◆ vive_tstatus
| struct vive_tracking_status lighthouse_system::vive_tstatus |
Visual tracking status for Index under Vive driver.
Referenced by valve_index_setup_visual_trackers().
◆ xfs
| struct xrt_fs* lighthouse_system::xfs |
Frameserver for Valve Index camera, if we have one.
The documentation for this struct was generated from the following file:
- targets/common/target_builder_lighthouse.c