Loading...
Searching...
No Matches
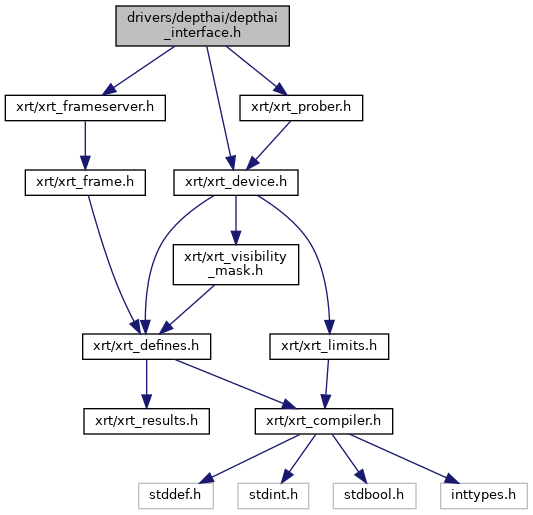
depthai_interface.h File Reference
Interface header for DepthAI camera. More...
Include dependency graph for depthai_interface.h:
Go to the source code of this file.
Data Structures | |
| struct | depthai_slam_startup_settings |
Macros | |
| #define | DEPTHAI_VID 0x03e7 |
| #define | DEPTHAI_PID 0x2485 |
Functions | |
| int | depthai_3dof_device_found (struct xrt_prober *xp, struct xrt_prober_device **devices, size_t device_count, size_t index, cJSON *attached_data, struct xrt_device **out_xdev) |
| struct xrt_fs * | depthai_fs_monocular_rgb (struct xrt_frame_context *xfctx) |
| Create a DepthAI frameserver using a single RGB camera. | |
| struct xrt_fs * | depthai_fs_slam (struct xrt_frame_context *xfctx, struct depthai_slam_startup_settings *settings) |
| Create a DepthAI frameserver using two gray cameras. | |
| bool | depthai_fs_get_stereo_calibration (struct xrt_fs *xfs, struct t_stereo_camera_calibration **c_ptr) |
| Get the stereo calibration from a depthAI frameserver. | |
Detailed Description
Interface header for DepthAI camera.