Mercury ML models! More...
#include "hg_sync.hpp"#include "hg_image_math.inl"#include "hg_numerics_checker.hpp"#include <filesystem>#include <array>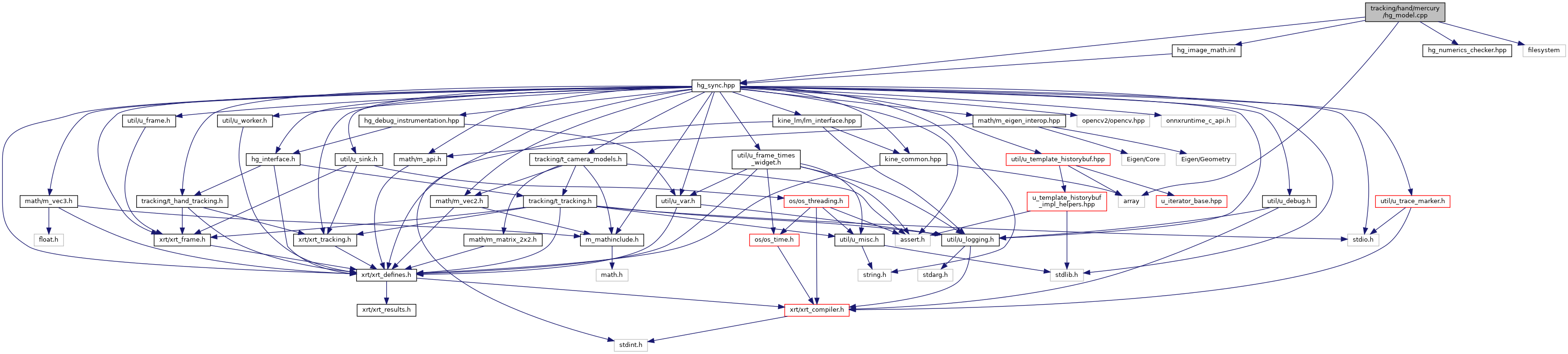
Functions | |
| static cv::Matx23f | xrt::tracking::hand::mercury::blackbar (const cv::Mat &in, enum t_camera_orientation rot, cv::Mat &out, xrt_size out_size) |
| static int | xrt::tracking::hand::mercury::argmax (const float *data, int size) |
| static bool | xrt::tracking::hand::mercury::hand_depth_center_of_mass (struct HandTracking *hgt, float data[22], float *out_depth, float *out_confidence) |
| static bool | xrt::tracking::hand::mercury::refine_center_of_distribution (struct HandTracking *hgt, const float *data, int coarse_x, int coarse_y, int w, int h, float *out_refined_x, float *out_refined_y) |
| static bool | xrt::tracking::hand::mercury::normalizeGrayscaleImage (cv::Mat &data_in, cv::Mat &data_out) |
| void | xrt::tracking::hand::mercury::setup_ort_api (HandTracking *hgt, onnx_state *state, const std::filesystem::path &path) |
| void | xrt::tracking::hand::mercury::setup_model_image_input (HandTracking *hgt, onnx_state *state, const char *name, int64_t w, int64_t h) |
| void | xrt::tracking::hand::mercury::init_hand_detection (HandTracking *hgt, onnx_state *wrap) |
| static void | xrt::tracking::hand::mercury::run_hand_detection_unsafe (hand_detection_run_info *info) |
| void | xrt::tracking::hand::mercury::run_hand_detection (void *ptr) |
Runs hand detection, expects ptr to be a hand_detection_run_info * | |
| void | xrt::tracking::hand::mercury::init_keypoint_estimation (HandTracking *hgt, onnx_state *state) |
| void | xrt::tracking::hand::mercury::make_keypoint_heatmap_output (int camera_idx, int hand_idx, int grid_pt_x, int grid_pt_y, float *plane, cv::Mat &out) |
| void | xrt::tracking::hand::mercury::make_keypoint_depth_heatmap_output (int camera_idx, int hand_idx, int grid_pt_x, int grid_pt_y, float *plane, cv::Mat &out) |
| void | xrt::tracking::hand::mercury::set_predicted_zero (float *data) |
| static void | xrt::tracking::hand::mercury::run_keypoint_estimation_unsafe (keypoint_estimation_run_info &info) |
| void | xrt::tracking::hand::mercury::run_keypoint_estimation (void *ptr) |
Runs keypoint estimation, excpets ptr to be a keypoint_estimation_run_info * | |
| void | xrt::tracking::hand::mercury::release_onnx_state (onnx_state *state) |
Variables | |
| enum xrt_hand_joint | xrt::tracking::hand::mercury::joints_ml_to_xr [21] |
Detailed Description
Mercury ML models!
Function Documentation
◆ normalizeGrayscaleImage()
|
static |
- Todo:
- optimize
References xrt::tracking::hand::mercury::normalizeGrayscaleImage(), and U_LOG_W.
Referenced by xrt::tracking::hand::mercury::normalizeGrayscaleImage(), and xrt::tracking::hand::mercury::run_keypoint_estimation_unsafe().
◆ refine_center_of_distribution()
|
static |
- Todo:
- this is not good and has at least one edge case, make it more readable and link to a jupyter notebook
References xrt::tracking::hand::mercury::refine_center_of_distribution().
Referenced by xrt::tracking::hand::mercury::refine_center_of_distribution(), and xrt::tracking::hand::mercury::run_keypoint_estimation_unsafe().
◆ run_hand_detection()
| void xrt::tracking::hand::mercury::run_hand_detection | ( | void * | ptr | ) |
Runs hand detection, expects ptr to be a hand_detection_run_info *
References xrt::tracking::hand::mercury::run_hand_detection().
Referenced by xrt::tracking::hand::mercury::run_hand_detection().
◆ run_keypoint_estimation()
| void xrt::tracking::hand::mercury::run_keypoint_estimation | ( | void * | ptr | ) |
Runs keypoint estimation, excpets ptr to be a keypoint_estimation_run_info *
References xrt::tracking::hand::mercury::run_keypoint_estimation(), and xrt::tracking::hand::mercury::run_keypoint_estimation_unsafe().
Referenced by xrt::tracking::hand::mercury::run_keypoint_estimation(), and t_hand_tracking_sync_mercury_create().
◆ run_keypoint_estimation_unsafe()
|
static |
- Todo:
- when you change this to have +Z-forward
References ARRAY_SIZE, xrt::tracking::hand::mercury::make_projection_instructions(), xrt::auxiliary::math::map_quat(), xrt::auxiliary::math::map_vec3(), math_map_ranges(), xrt::tracking::hand::mercury::normalizeGrayscaleImage(), xrt::tracking::hand::mercury::refine_center_of_distribution(), xrt::tracking::hand::mercury::run_keypoint_estimation_unsafe(), and U_LOG_D.
Referenced by xrt::tracking::hand::mercury::run_keypoint_estimation(), and xrt::tracking::hand::mercury::run_keypoint_estimation_unsafe().
Variable Documentation
◆ joints_ml_to_xr
| enum xrt_hand_joint xrt::tracking::hand::mercury::joints_ml_to_xr[21] |