Loading...
Searching...
No Matches
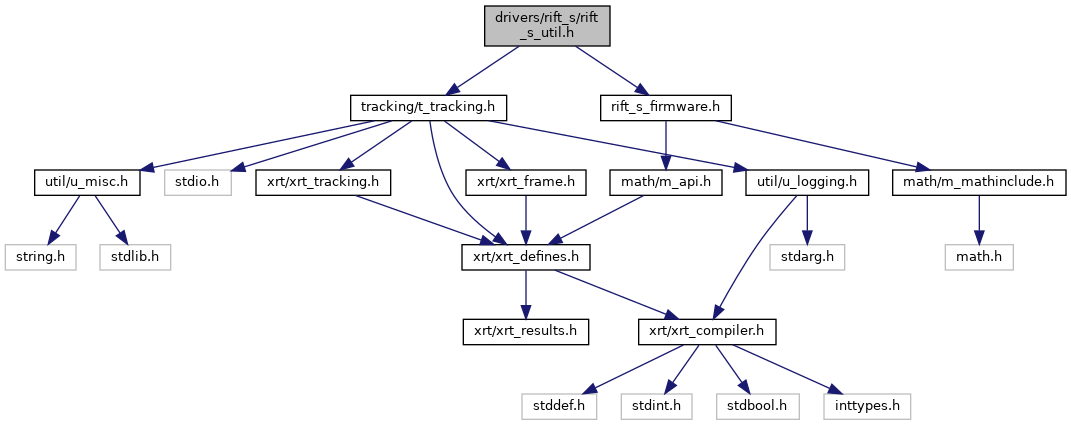
rift_s_util.h File Reference
Oculus Rift S utility functions. More...
Include dependency graph for rift_s_util.h:
Go to the source code of this file.
Functions | |
| struct t_camera_calibration | rift_s_get_cam_calib (struct rift_s_camera_calibration_block *camera_calibration, enum rift_s_camera_id cam_id) |
| struct t_stereo_camera_calibration * | rift_s_create_stereo_camera_calib_rotated (struct rift_s_camera_calibration_block *camera_calibration) |
| Allocate and populate an OpenCV-compatible t_stereo_camera_calibration pointer from the Rift S config. | |
Detailed Description
Oculus Rift S utility functions.
Function Documentation
◆ rift_s_create_stereo_camera_calib_rotated()
| struct t_stereo_camera_calibration * rift_s_create_stereo_camera_calib_rotated | ( | struct rift_s_camera_calibration_block * | camera_calibration | ) |
Allocate and populate an OpenCV-compatible t_stereo_camera_calibration pointer from the Rift S config.
This requires fitting a KB4 fisheye polynomial to the 6 radial + 2 tangential 'Fisheye62' parameters provided by the Rift S.
References t_stereo_camera_calibration::camera_rotation, t_stereo_camera_calibration::camera_translation, math_matrix_3x3_from_quat(), T_DISTORTION_FISHEYE_KB4, t_stereo_camera_calibration::t_stereo_camera_calibration_alloc(), and t_stereo_camera_calibration::view.
Referenced by rift_s_tracker_create().