Loading...
Searching...
No Matches
wmr_source.c File Reference
WMR camera and IMU data source. More...
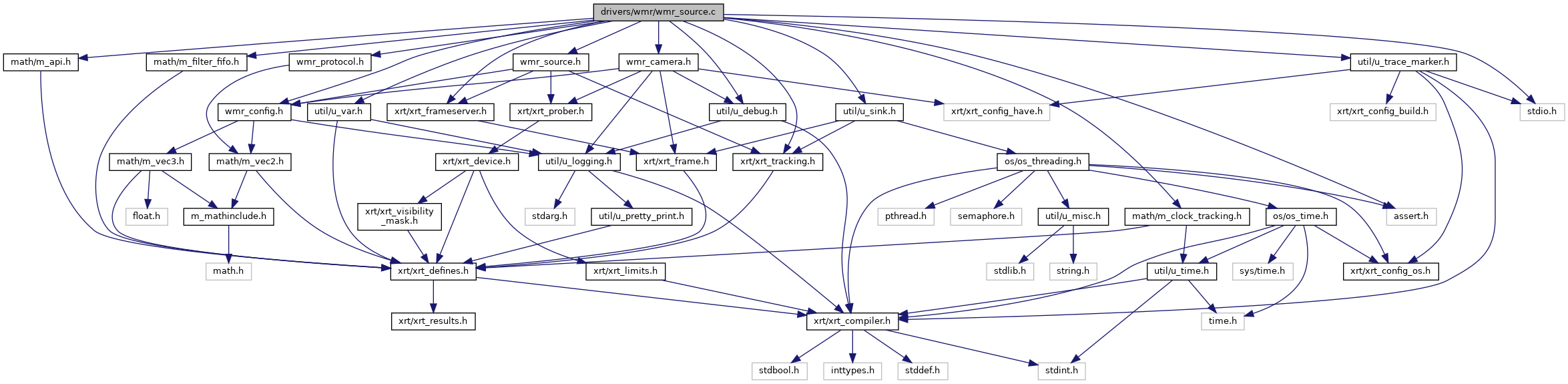
#include "wmr_source.h"#include "wmr_camera.h"#include "wmr_config.h"#include "wmr_protocol.h"#include "math/m_api.h"#include "math/m_clock_tracking.h"#include "math/m_filter_fifo.h"#include "util/u_debug.h"#include "util/u_sink.h"#include "util/u_var.h"#include "util/u_trace_marker.h"#include "xrt/xrt_tracking.h"#include "xrt/xrt_frameserver.h"#include <assert.h>#include <stdio.h>
Include dependency graph for wmr_source.c:
Data Structures | |
| struct | wmr_source |
| Handles all the data sources from the WMR driver. More... | |
Macros | |
| #define | WMR_SOURCE_STR "WMR Source" |
| #define | WMR_TRACE(w, ...) U_LOG_IFL_T(w->log_level, __VA_ARGS__) |
| #define | WMR_DEBUG(w, ...) U_LOG_IFL_D(w->log_level, __VA_ARGS__) |
| #define | WMR_INFO(w, ...) U_LOG_IFL_I(w->log_level, __VA_ARGS__) |
| #define | WMR_WARN(w, ...) U_LOG_IFL_W(w->log_level, __VA_ARGS__) |
| #define | WMR_ERROR(w, ...) U_LOG_IFL_E(w->log_level, __VA_ARGS__) |
| #define | WMR_ASSERT(predicate, ...) |
| #define | WMR_ASSERT_(predicate) WMR_ASSERT(predicate, "Assertion failed " #predicate) |
| #define | DEFINE_RECEIVE_CAM(cam_id) |
Functions | |
| static void | receive_cam0 (struct xrt_frame_sink *sink, struct xrt_frame *xf) |
| static void | receive_cam1 (struct xrt_frame_sink *sink, struct xrt_frame *xf) |
| static void | receive_cam2 (struct xrt_frame_sink *sink, struct xrt_frame *xf) |
| static void | receive_cam3 (struct xrt_frame_sink *sink, struct xrt_frame *xf) |
| static void | receive_imu_sample (struct xrt_imu_sink *sink, struct xrt_imu_sample *s) |
| static struct wmr_source * | wmr_source_from_xfs (struct xrt_fs *xfs) |
| static bool | wmr_source_enumerate_modes (struct xrt_fs *xfs, struct xrt_fs_mode **out_modes, uint32_t *out_count) |
| static bool | wmr_source_configure_capture (struct xrt_fs *xfs, struct xrt_fs_capture_parameters *cp) |
| static bool | wmr_source_stream_stop (struct xrt_fs *xfs) |
| static bool | wmr_source_is_running (struct xrt_fs *xfs) |
| static bool | wmr_source_stream_start (struct xrt_fs *xfs, struct xrt_frame_sink *xs, enum xrt_fs_capture_type capture_type, uint32_t descriptor_index) |
| static bool | wmr_source_slam_stream_start (struct xrt_fs *xfs, struct xrt_slam_sinks *sinks) |
| static void | wmr_source_node_break_apart (struct xrt_frame_node *node) |
| static void | wmr_source_node_destroy (struct xrt_frame_node *node) |
| struct xrt_fs * | wmr_source_create (struct xrt_frame_context *xfctx, struct xrt_prober_device *dev_holo, struct wmr_hmd_config cfg) |
| Create and open the frame server for IMU/camera streaming. | |
| void | wmr_source_push_imu_packet (struct xrt_fs *xfs, timepoint_ns t, struct xrt_vec3 accel, struct xrt_vec3 gyro) |
Variables | |
| void(* | receive_cam [4])(struct xrt_frame_sink *, struct xrt_frame *) |
| Define a function for each WMR_MAX_CAMERAS and reference it in this array. | |
Detailed Description
WMR camera and IMU data source.
Macro Definition Documentation
◆ DEFINE_RECEIVE_CAM
| #define DEFINE_RECEIVE_CAM | ( | cam_id | ) |
Value:
{ \
if (cam_id == 0) { \
ws->cam_hw2mono = ws->hw2mono; \
} \
xf->timestamp += ws->cam_hw2mono; \
WMR_TRACE(ws, "cam" #cam_id " img t=%" PRId64 " source_t=%" PRId64, xf->timestamp, \
xf->source_timestamp); \
u_sink_debug_push_frame(&ws->ui_cam_sinks[cam_id], xf); \
if (ws->out_sinks.cams[cam_id] && ws->first_imu_received) { \
xrt_sink_push_frame(ws->out_sinks.cams[cam_id], xf); \
} \
}
#define container_of(ptr, type, field)
Get the holder from a pointer to a field.
Definition xrt_compiler.h:298
time_duration_ns hw2mono
Estimated offset from IMU to monotonic clock.
Definition wmr_source.c:77
struct u_sink_debug ui_cam_sinks[4]
Sink to display camera frames in UI.
Definition wmr_source.c:70
bool first_imu_received
Don't send frames until first IMU sample.
Definition wmr_source.c:75
struct xrt_slam_sinks out_sinks
Pointers to downstream sinks.
Definition wmr_source.c:67
time_duration_ns cam_hw2mono
Caches hw2mono for use in the full frame bundle.
Definition wmr_source.c:78
struct xrt_frame_sink cam_sinks[4]
Intermediate sinks for camera frames.
Definition wmr_source.c:64
void(* receive_cam[4])(struct xrt_frame_sink *, struct xrt_frame *)
Define a function for each WMR_MAX_CAMERAS and reference it in this array.
Definition wmr_source.c:109
◆ WMR_ASSERT
| #define WMR_ASSERT | ( | predicate, | |
| ... | |||
| ) |
Value:
do { \
bool p = predicate; \
if (!p) { \
U_LOG(U_LOGGING_ERROR, __VA_ARGS__); \
assert(false && "WMR_ASSERT failed: " #predicate); \
exit(EXIT_FAILURE); \
} \
} while (false);
Function Documentation
◆ receive_imu_sample()
|
static |
<
- Todo:
- use 1000 if "average_imus" is false
References wmr_source::accel_ff, container_of, wmr_source::first_imu_received, wmr_source::gyro_ff, wmr_source::hw2mono, wmr_source::imu_sink, wmr_source::last_imu_ns, m_clock_offset_a2b(), m_ff_vec3_f32_push(), os_monotonic_get_ns(), and wmr_source::out_sinks.
Referenced by wmr_source_create().
Variable Documentation
◆ receive_cam
| void(* receive_cam[4])(struct xrt_frame_sink *, struct xrt_frame *) | ( | struct xrt_frame_sink * | , |
| struct xrt_frame * | |||
| ) |
Initial value:
= {
receive_cam0,
receive_cam1,
receive_cam2,
receive_cam3,
}
Define a function for each WMR_MAX_CAMERAS and reference it in this array.
Referenced by wmr_source_create().