Loading...
Searching...
No Matches
correspondence_search.h File Reference
Ab-initio blob<->LED correspondence search. More...
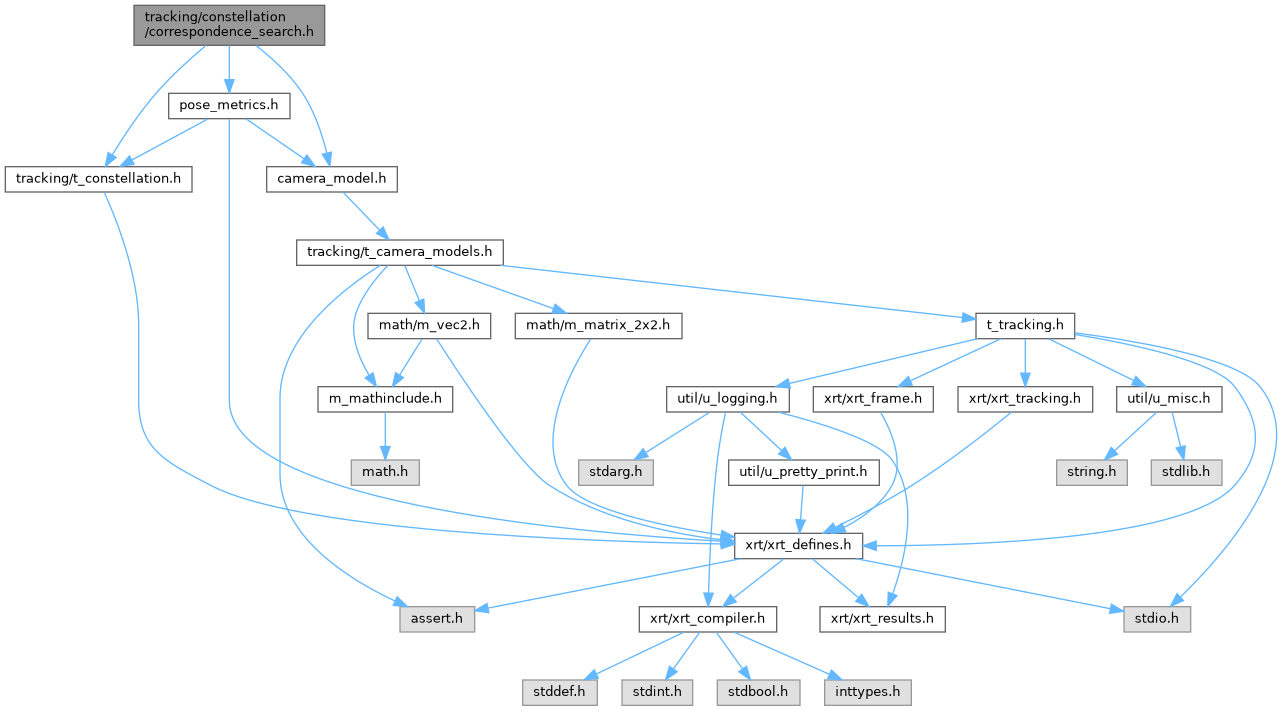
Include dependency graph for correspondence_search.h:
Go to the source code of this file.
Data Structures | |
| struct | cs_image_point |
| struct | cs_model_info |
| struct | correspondence_search |
Macros | |
| #define | MAX_BLOB_SEARCH_DEPTH 5 |
Enumerations | |
| enum | correspondence_search_flags { CS_FLAG_NONE = 0x0 , CS_FLAG_SHALLOW_SEARCH = 0x1 , CS_FLAG_DEEP_SEARCH = 0x2 , CS_FLAG_STOP_FOR_STRONG_MATCH = 0x4 , CS_FLAG_MATCH_ALL_BLOBS = 0x8 , CS_FLAG_HAVE_POSE_PRIOR = 0x10 , CS_FLAG_MATCH_GRAVITY = 0x20 } |
Functions | |
| struct correspondence_search * | correspondence_search_new (const enum u_logging_level *ct_log_level, struct camera_model *camera_calib) |
| void | correspondence_search_free (struct correspondence_search *cs) |
| void | correspondence_search_set_blobs (struct correspondence_search *cs, struct t_blob *blobs, int num_blobs) |
| bool | correspondence_search_find_one_pose (struct correspondence_search *cs, struct t_constellation_search_model *model, enum correspondence_search_flags search_flags, struct xrt_pose *pose, struct xrt_vec3 *pos_error_thresh, struct xrt_vec3 *rot_error_thresh, struct xrt_vec3 *gravity_vector, float gravity_tolerance_rad, struct pose_metrics *score) |
Detailed Description
Ab-initio blob<->LED correspondence search.