Loading...
Searching...
No Matches
ht_driver.c File Reference
Camera based hand tracking driver code. More...
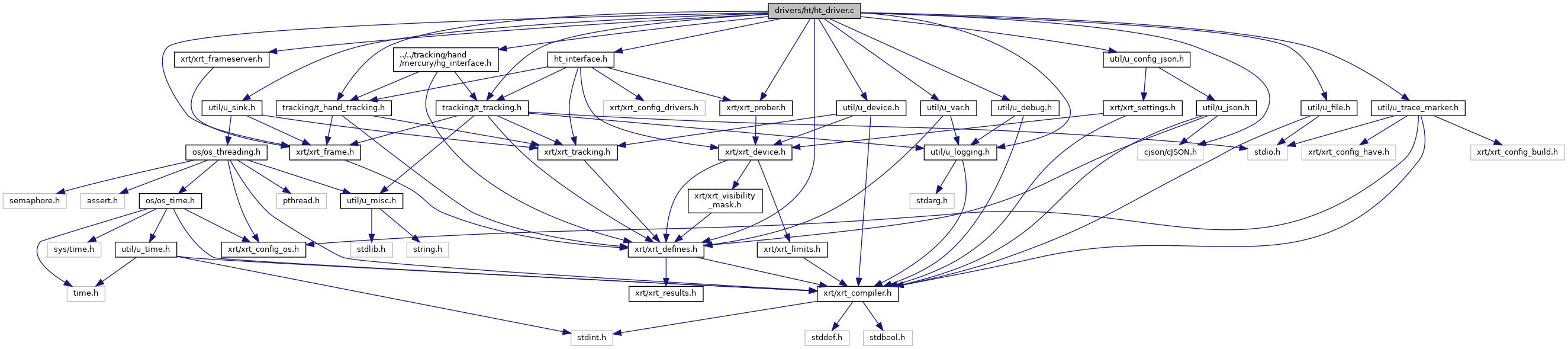
#include "ht_interface.h"#include "tracking/t_tracking.h"#include "util/u_var.h"#include "xrt/xrt_defines.h"#include "xrt/xrt_frame.h"#include "xrt/xrt_frameserver.h"#include "xrt/xrt_prober.h"#include "util/u_device.h"#include "util/u_logging.h"#include "util/u_trace_marker.h"#include "util/u_config_json.h"#include "util/u_debug.h"#include "util/u_sink.h"#include "util/u_file.h"#include "tracking/t_hand_tracking.h"#include "hand/mercury/hg_interface.h"#include <cjson/cJSON.h>
Include dependency graph for ht_driver.c:
Data Structures | |
| struct | ht_device |
Macros | |
| #define | HT_TRACE(htd, ...) U_LOG_XDEV_IFL_T(&htd->base, htd->log_level, __VA_ARGS__) |
| #define | HT_DEBUG(htd, ...) U_LOG_XDEV_IFL_D(&htd->base, htd->log_level, __VA_ARGS__) |
| #define | HT_INFO(htd, ...) U_LOG_XDEV_IFL_I(&htd->base, htd->log_level, __VA_ARGS__) |
| #define | HT_WARN(htd, ...) U_LOG_XDEV_IFL_W(&htd->base, htd->log_level, __VA_ARGS__) |
| #define | HT_ERROR(htd, ...) U_LOG_XDEV_IFL_E(&htd->base, htd->log_level, __VA_ARGS__) |
Functions | |
| static struct ht_device * | ht_device (struct xrt_device *xdev) |
| static xrt_result_t | ht_device_get_hand_tracking (struct xrt_device *xdev, enum xrt_input_name name, int64_t at_timestamp_ns, struct xrt_hand_joint_set *out_value, int64_t *out_timestamp_ns) |
| xrt_device function implementations | |
| static void | ht_device_destroy (struct xrt_device *xdev) |
| static struct ht_device * | ht_device_create_common (struct t_stereo_camera_calibration *calib, bool own_xfctx, struct xrt_frame_context *xfctx, struct t_hand_tracking_sync *sync) |
| int | ht_device_create (struct xrt_frame_context *xfctx, struct t_stereo_camera_calibration *calib, struct t_hand_tracking_create_info create_info, struct xrt_slam_sinks **out_sinks, struct xrt_device **out_device) |
| Create hand tracker. | |
Detailed Description
Camera based hand tracking driver code.
Function Documentation
◆ ht_device_create_common()
|
static |
- Todo:
- 2 hands hardcoded
References xrt_device::destroy, xrt_device::get_hand_tracking, ht_device_get_hand_tracking(), xrt_device::inputs, xrt_device::name, ht_device::own_xfctx, xrt_device::serial, xrt_device::str, xrt_device::supported, t_hand_tracking_async_default_create(), xrt_device::tracking_origin, xrt_tracking_origin::type, u_device_noop_update_inputs(), xrt_device::update_inputs, and XRT_TRACKING_TYPE_RGB.
Referenced by ht_device_create().
◆ ht_device_get_hand_tracking()
|
static |
xrt_device function implementations
References XRT_ERROR_INPUT_UNSUPPORTED, and XRT_SUCCESS.
Referenced by ht_device_create_common().