Loading...
Searching...
No Matches
Metrics for constellation tracking poses. More...
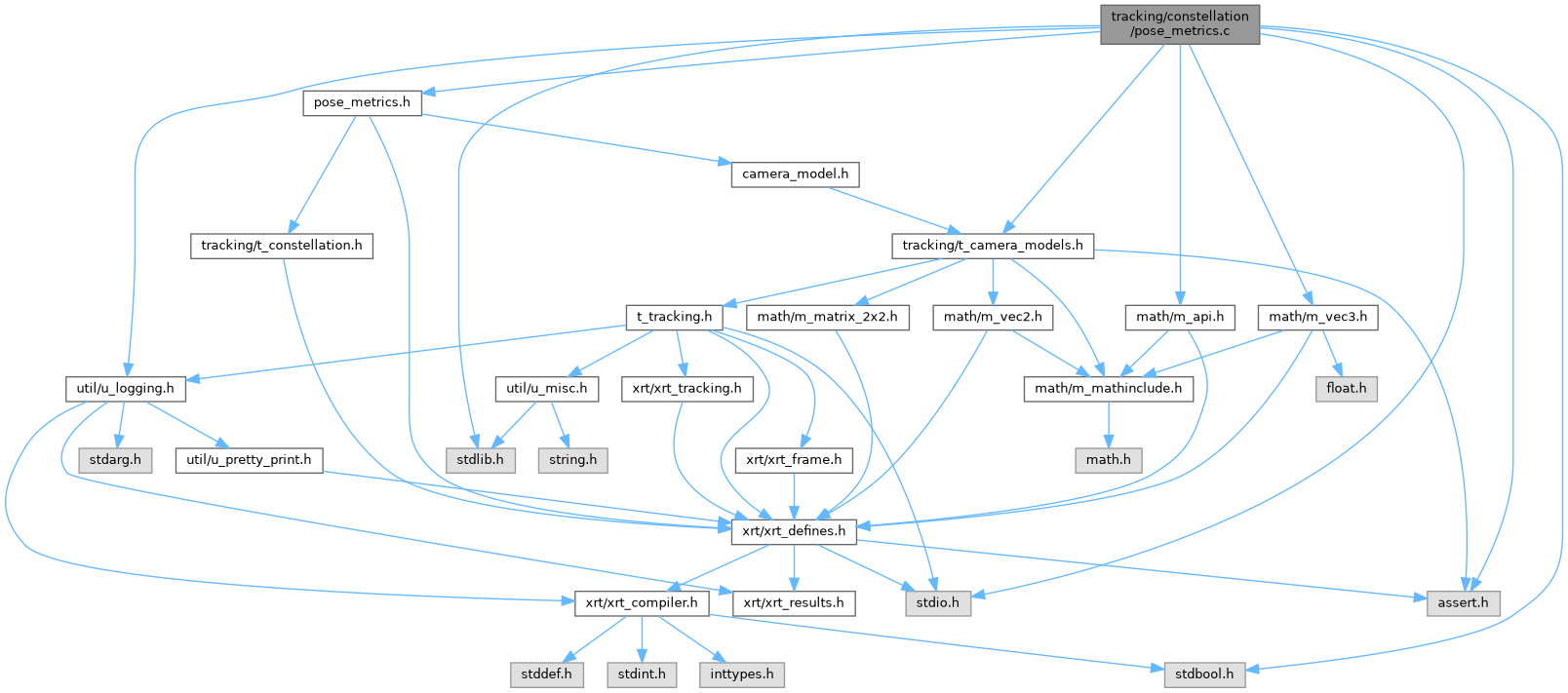
#include "math/m_api.h"#include "math/m_vec3.h"#include "util/u_logging.h"#include "tracking/t_camera_models.h"#include "pose_metrics.h"#include <assert.h>#include <stdio.h>#include <stdbool.h>#include <stdlib.h>
Include dependency graph for pose_metrics.c:
Macros | |
| #define | POSE_METRICS_SPEW 0 |
| #define | LOG_SPEW(...) |
Functions | |
| static void | expand_rect (struct pose_rect *bounds, double x, double y, double w, double h) |
| static int | find_best_matching_led (struct pose_metrics_visible_led_info *led_points, int num_leds, struct t_blob *blob, double *out_sqerror) |
| static void | check_pose_prior (struct pose_metrics *score, const struct xrt_pose *pose, struct xrt_pose *pose_prior, const struct xrt_vec3 *pos_error_thresh, const struct xrt_vec3 *rot_error_thresh) |
| static bool | project_led_points (struct t_constellation_tracker_led_model *led_model, struct camera_model *calib, const struct xrt_pose *pose, struct xrt_vec3 *out_positions, struct xrt_vec2 *out_points) |
| static void | get_visible_leds_and_bounds (const struct xrt_pose *T_cam_obj, struct t_constellation_tracker_led_model *led_model, struct camera_model *calib, struct pose_metrics_visible_led_info *visible_led_points, int *num_visible_leds, struct pose_rect *bounds) |
| void | pose_metrics_match_pose_to_blobs (const struct xrt_pose *pose, struct t_blob *blobs, int num_blobs, struct t_constellation_tracker_led_model *led_model, t_constellation_device_id_t device_id, struct camera_model *calib, struct pose_metrics_blob_match_info *match_info) |
| void | pose_metrics_evaluate_pose (struct pose_metrics *score, const struct xrt_pose *pose, struct t_blob *blobs, int num_blobs, struct t_constellation_tracker_led_model *led_model, t_constellation_device_id_t device_id, struct camera_model *calib, struct pose_rect *out_bounds) |
| void | pose_metrics_evaluate_pose_with_prior (struct pose_metrics *score, const struct xrt_pose *pose, bool prior_must_match, struct xrt_pose *pose_prior, const struct xrt_vec3 *pos_error_thresh, const struct xrt_vec3 *rot_error_thresh, struct t_blob *blobs, int num_blobs, struct t_constellation_tracker_led_model *led_model, t_constellation_device_id_t device_id, struct camera_model *calib, struct pose_rect *out_bounds) |
| bool | pose_metrics_score_is_better_pose (struct pose_metrics *old_score, struct pose_metrics *new_score) |
| Compares whether new_score is a better pose than old_score. | |
Detailed Description
Metrics for constellation tracking poses.
Function Documentation
◆ pose_metrics_score_is_better_pose()
| bool pose_metrics_score_is_better_pose | ( | struct pose_metrics * | old_score, |
| struct pose_metrics * | new_score | ||
| ) |
Compares whether new_score is a better pose than old_score.
- Parameters
-
old_score The old score to compare against. new_score The new score to compare against the old score.
- Returns
- true if the new score is a better pose than the old score, false otherwise.
References pose_metrics::orient_error, POSE_HAD_PRIOR, POSE_MATCH_GOOD, and POSE_MATCH_STRONG.