Loading...
Searching...
No Matches
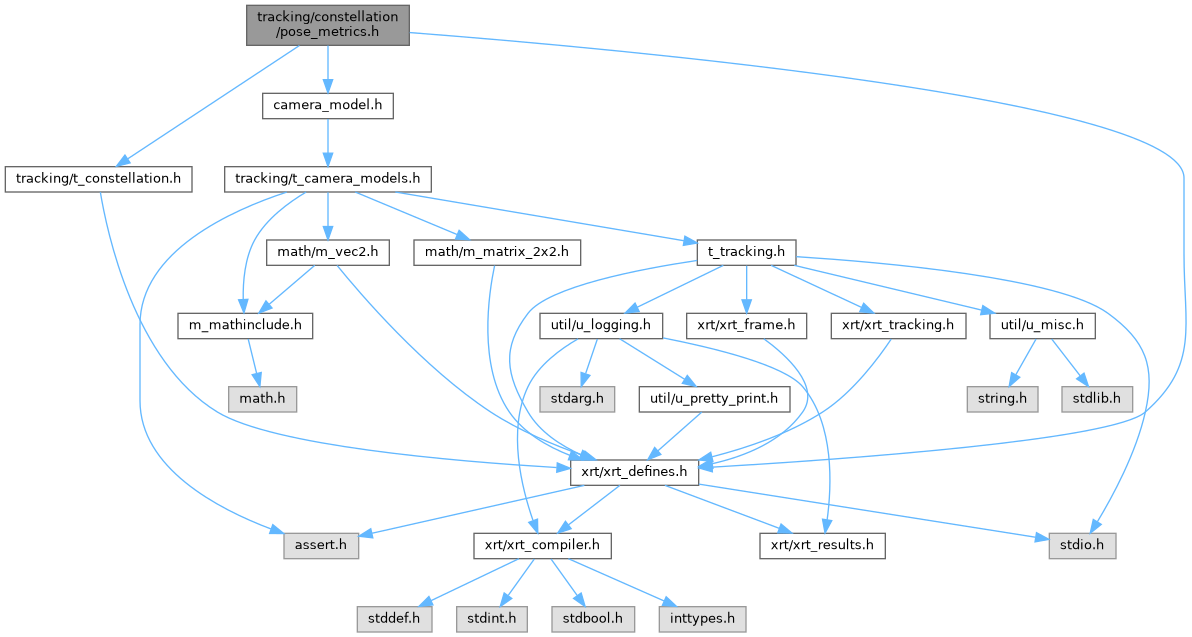
pose_metrics.h File Reference
Metrics for constellation tracking poses. More...
Include dependency graph for pose_metrics.h:
Go to the source code of this file.
Data Structures | |
| struct | pose_rect |
| struct | pose_metrics |
| struct | pose_metrics_visible_led_info |
| struct | pose_metrics_blob_match_info |
Enumerations | |
| enum | pose_match_flags { POSE_MATCH_GOOD = 0x1 , POSE_MATCH_STRONG = 0x2 , POSE_MATCH_POSITION = 0x10 , POSE_MATCH_ORIENT = 0x20 , POSE_HAD_PRIOR = 0x100 , POSE_MATCH_LED_IDS = 0x200 } |
Functions | |
| static XRT_MAYBE_UNUSED bool | pose_rect_has_area (struct pose_rect *rect) |
| void | pose_metrics_match_pose_to_blobs (const struct xrt_pose *pose, struct t_blob *blobs, int num_blobs, struct t_constellation_tracker_led_model *led_model, t_constellation_device_id_t device_id, struct camera_model *calib, struct pose_metrics_blob_match_info *match_info) |
| void | pose_metrics_evaluate_pose (struct pose_metrics *score, const struct xrt_pose *pose, struct t_blob *blobs, int num_blobs, struct t_constellation_tracker_led_model *leds_model, t_constellation_device_id_t device_id, struct camera_model *calib, struct pose_rect *out_bounds) |
| void | pose_metrics_evaluate_pose_with_prior (struct pose_metrics *score, const struct xrt_pose *pose, bool prior_must_match, struct xrt_pose *pose_prior, const struct xrt_vec3 *pos_error_thresh, const struct xrt_vec3 *rot_error_thresh, struct t_blob *blobs, int num_blobs, struct t_constellation_tracker_led_model *led_model, t_constellation_device_id_t device_id, struct camera_model *calib, struct pose_rect *out_bounds) |
| bool | pose_metrics_score_is_better_pose (struct pose_metrics *old_score, struct pose_metrics *new_score) |
| Compares whether new_score is a better pose than old_score. | |
Detailed Description
Metrics for constellation tracking poses.
Enumeration Type Documentation
◆ pose_match_flags
| enum pose_match_flags |
Function Documentation
◆ pose_metrics_score_is_better_pose()
| bool pose_metrics_score_is_better_pose | ( | struct pose_metrics * | old_score, |
| struct pose_metrics * | new_score | ||
| ) |
Compares whether new_score is a better pose than old_score.
- Parameters
-
old_score The old score to compare against. new_score The new score to compare against the old score.
- Returns
- true if the new score is a better pose than the old score, false otherwise.
References pose_metrics::orient_error, POSE_HAD_PRIOR, POSE_MATCH_GOOD, and POSE_MATCH_STRONG.