Driver code for Oculus Rift S headsets. More...
#include <stdbool.h>#include <math.h>#include "tinyceres/tiny_solver.hpp"#include "tinyceres/tiny_solver_autodiff_function.hpp"#include "rift_s_util.h"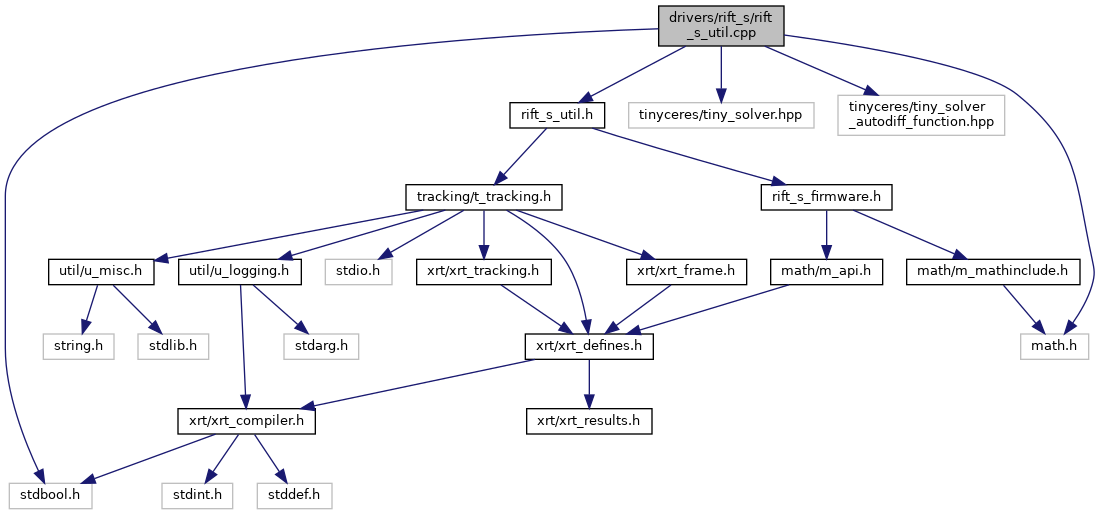
Data Structures | |
| struct | UndistortCostFunctor |
| struct | TargetPoint |
| struct | DistortParamKB4CostFunctor |
Macros | |
| #define | STEPS 21 |
Functions | |
| template<typename T > | |
| bool | fisheye62_undistort_func (struct t_camera_calibration *calib, const double *distortion_params, const T point[2], T *out_point) |
| template<typename T > | |
| bool | kb4_distort_func (struct t_camera_calibration *calib, const T *distortion_params, const double point[2], T *out_point) |
| struct t_camera_calibration | rift_s_get_cam_calib (struct rift_s_camera_calibration_block *camera_calibration, enum rift_s_camera_id cam_id) |
| struct t_stereo_camera_calibration * | rift_s_create_stereo_camera_calib_rotated (struct rift_s_camera_calibration_block *camera_calibration) |
| Allocate and populate an OpenCV-compatible t_stereo_camera_calibration pointer from the Rift S config. | |
Variables | |
| const int | N_KB4_DISTORT_PARAMS = 4 |
Detailed Description
Driver code for Oculus Rift S headsets.
Utility functions for generating a stereo camera calibration, and converting the Rift S Fisheye62 distortion parameters into OpenCV-compatible Kannala-Brandt parameters
Function Documentation
◆ rift_s_create_stereo_camera_calib_rotated()
| struct t_stereo_camera_calibration * rift_s_create_stereo_camera_calib_rotated | ( | struct rift_s_camera_calibration_block * | camera_calibration | ) |
Allocate and populate an OpenCV-compatible t_stereo_camera_calibration pointer from the Rift S config.
This requires fitting a KB4 fisheye polynomial to the 6 radial + 2 tangential 'Fisheye62' parameters provided by the Rift S.
References t_stereo_camera_calibration::camera_rotation, t_stereo_camera_calibration::camera_translation, math_matrix_3x3_from_quat(), T_DISTORTION_FISHEYE_KB4, t_stereo_camera_calibration::t_stereo_camera_calibration_alloc(), and t_stereo_camera_calibration::view.
Referenced by rift_s_tracker_create().