Loading...
Searching...
No Matches
t_data_utils.c File Reference
Small data helpers for calibration. More...
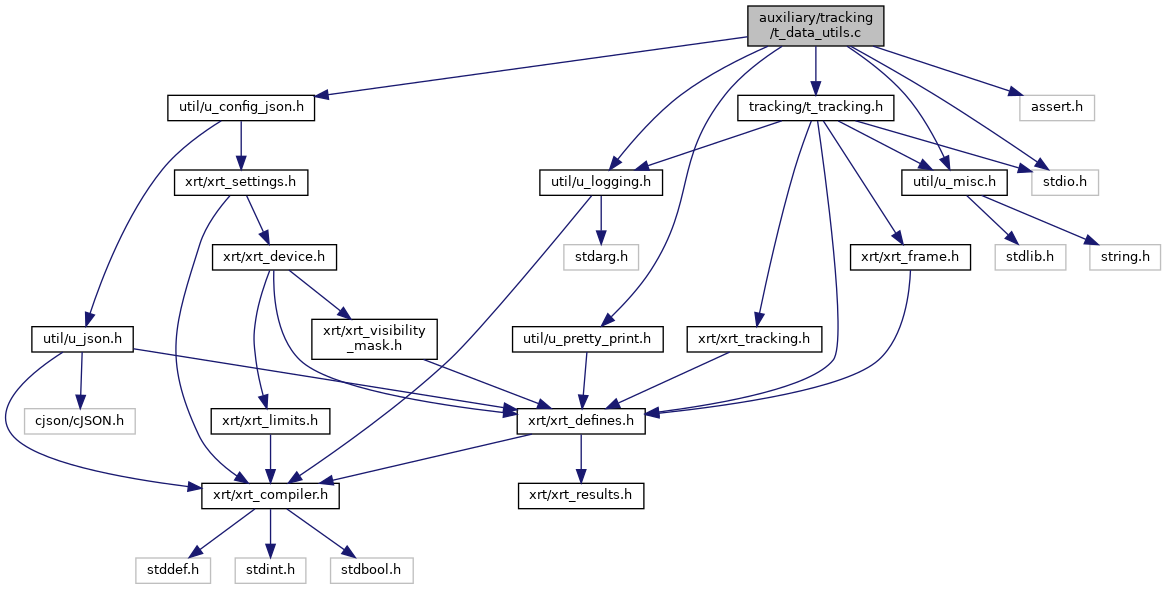
#include "tracking/t_tracking.h"#include "util/u_config_json.h"#include "util/u_misc.h"#include "util/u_logging.h"#include "util/u_pretty_print.h"#include <stdio.h>#include <assert.h>
Include dependency graph for t_data_utils.c:
Macros | |
| #define | P(...) |
Functions | |
| static void | dump_mat (const char *var, double mat[3][3]) |
| static void | dump_vector (const char *var, double vec[3]) |
| static void | dump_size (const char *var, struct xrt_size size) |
| static void | dump_distortion (struct t_camera_calibration *view) |
| void | t_stereo_camera_calibration_alloc (struct t_stereo_camera_calibration **out_c, const enum t_camera_distortion_model distortion_model) |
| void | t_stereo_camera_calibration_destroy (struct t_stereo_camera_calibration *c) |
| void | t_camera_calibration_dump (struct t_camera_calibration *c) |
| void | t_stereo_camera_calibration_dump (struct t_stereo_camera_calibration *c) |
| void | t_calibration_gui_params_parse_from_json (const struct cJSON *params, struct t_calibration_params *p) |
| void | t_calibration_gui_params_to_json (struct cJSON **out_json, struct t_calibration_params *p) |
| void | t_calibration_gui_params_default (struct t_calibration_params *p) |
| void | t_calibration_gui_params_load_or_default (struct t_calibration_params *p) |
| static void | t_inertial_calibration_dump_pp (u_pp_delegate_t dg, struct t_inertial_calibration *c) |
| void | t_inertial_calibration_dump (struct t_inertial_calibration *c) |
| void | t_imu_calibration_dump (struct t_imu_calibration *c) |
Detailed Description
Small data helpers for calibration.
Macro Definition Documentation
◆ P
| #define P | ( | ... | ) |
Value:
do { \
ssize_t _ret = 0; \
if ((size_t)curr < sizeof(buf)) { \
_ret = snprintf(buf + curr, sizeof(buf) - (size_t)curr, __VA_ARGS__); \
} \
if (_ret > 0) { \
curr += _ret; \
} \
} while (false)