Loading...
Searching...
No Matches
vive_calibration.c File Reference
Vive calibration getters. More...
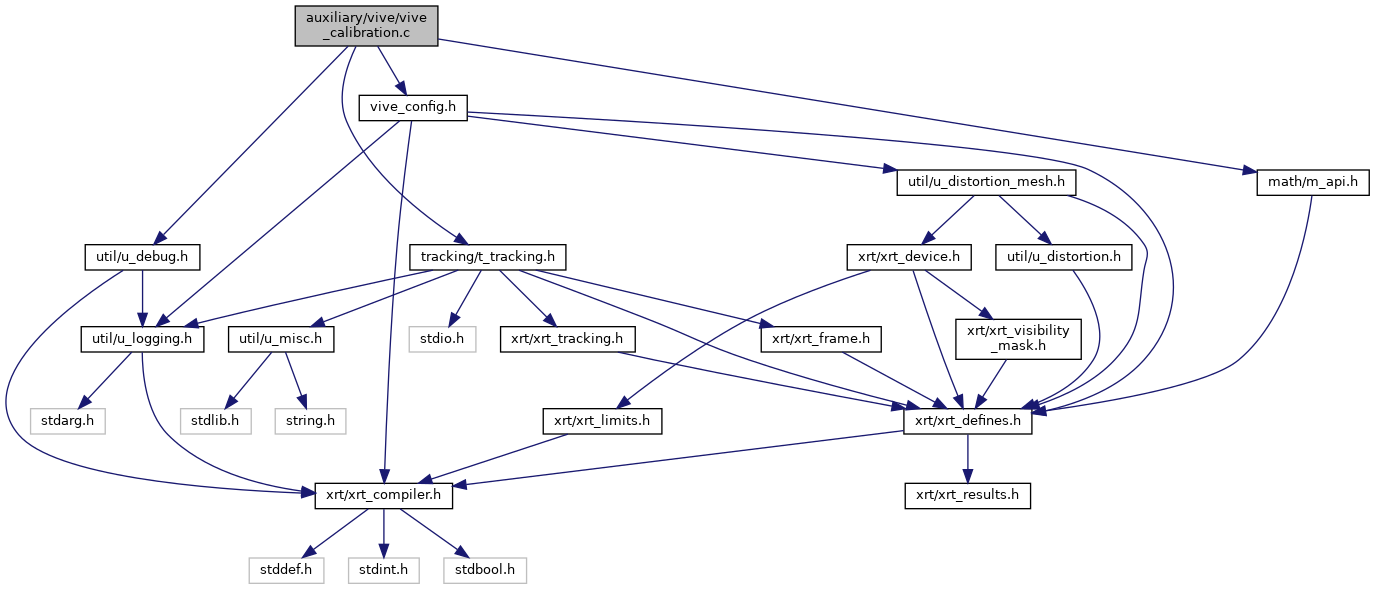
#include "math/m_api.h"#include "util/u_debug.h"#include "tracking/t_tracking.h"#include "vive_config.h"
Include dependency graph for vive_calibration.c:
Macros | |
| #define | VIVE_TRACE(d, ...) U_LOG_IFL_T(d->log_level, __VA_ARGS__) |
| #define | VIVE_DEBUG(d, ...) U_LOG_IFL_D(d->log_level, __VA_ARGS__) |
| #define | VIVE_INFO(d, ...) U_LOG_IFL_I(d->log_level, __VA_ARGS__) |
| #define | VIVE_WARN(d, ...) U_LOG_IFL_W(d->log_level, __VA_ARGS__) |
| #define | VIVE_ERROR(d, ...) U_LOG_IFL_E(d->log_level, __VA_ARGS__) |
Functions | |
| static struct t_camera_calibration | vive_get_camera_calibration (const struct vive_config *d, int cam_index) |
| bool | vive_get_stereo_camera_calibration (const struct vive_config *d, struct t_stereo_camera_calibration **calibration_ptr_to_ref, struct xrt_pose *out_head_in_left_camera) |
| Get a t_stereo_camera_calibration and xrt_pose from left camera to head translation. | |
| void | vive_get_slam_cams_calib (const struct vive_config *d, struct t_slam_camera_calibration *out_calib0, struct t_slam_camera_calibration *out_calib1) |
| Camera calibrations for SLAM. | |
| void | vive_get_imu_calibration (const struct vive_config *d, struct t_imu_calibration *out_calib) |
| Get a t_imu_calibration for the IMU. | |
| void | vive_get_slam_imu_calibration (const struct vive_config *d, struct t_slam_imu_calibration *out_calib) |
| Get a t_slam_imu_calibration for the IMU. | |
Detailed Description
Vive calibration getters.