WMR and MS HoloLens configuration structures. More...
#include "math/m_vec2.h"#include "math/m_vec3.h"#include "util/u_logging.h"#include "util/u_distortion_mesh.h"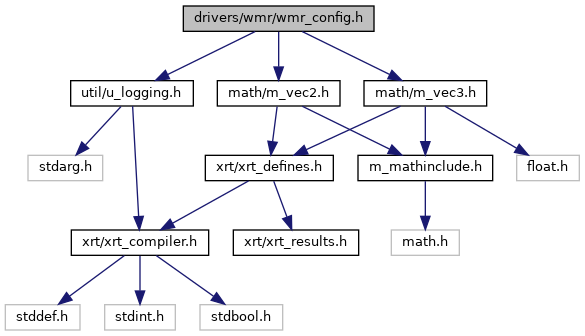
Go to the source code of this file.
Data Structures | |
| struct | wmr_distortion_6KT |
| struct | wmr_distortion_eye_config |
| struct | wmr_camera_config |
| struct | wmr_inertial_sensor_config |
| struct | wmr_sensor_transforms_config |
| struct | wmr_inertial_sensors_config |
| struct | wmr_led_config |
| struct | wmr_hmd_config |
| struct | wmr_controller_config |
Macros | |
| #define | WMR_MAX_CAMERAS 4 |
| #define | WMR_MAX_LEDS 40 |
Functions | |
| bool | wmr_hmd_config_parse (struct wmr_hmd_config *c, char *json_string, enum u_logging_level log_level) |
| bool | wmr_controller_config_parse (struct wmr_controller_config *c, char *json_string, enum u_logging_level log_level) |
| void | wmr_config_precompute_transforms (struct wmr_inertial_sensors_config *sensors, struct wmr_distortion_eye_config *eye_params) |
| Precompute transforms to convert between OpenXR and WMR coordinate systems. | |
Detailed Description
WMR and MS HoloLens configuration structures.
Function Documentation
◆ wmr_config_precompute_transforms()
| void wmr_config_precompute_transforms | ( | struct wmr_inertial_sensors_config * | sensors, |
| struct wmr_distortion_eye_config * | eye_params | ||
| ) |
Precompute transforms to convert between OpenXR and WMR coordinate systems.
OpenXR: X: Right, Y: Up, Z: Backward WMR: X: Right, Y: Down, Z: Forward ┌────────────────────┐ │ OXR WMR │ │ │ │ ▲ y │ │ │ ▲ z │ │ │ x │ x │ │ ├──────► ├──────► │ │ │ │ │ │ ▼ z │ │ │ ▼ y │ └────────────────────┘
References xrt_pose::math_pose_identity(), xrt_pose::math_pose_interpolate(), xrt_pose::math_pose_invert(), xrt_pose::math_pose_transform(), wmr_sensor_transforms_config::P_ht0_me, wmr_sensor_transforms_config::P_imu_me, wmr_sensor_transforms_config::P_oxr_acc, wmr_sensor_transforms_config::P_oxr_gyr, and wmr_inertial_sensor_config::pose.
Referenced by wmr_hmd_create().