Loading...
Searching...
No Matches
Ab-initio blob<->LED correspondence search. More...
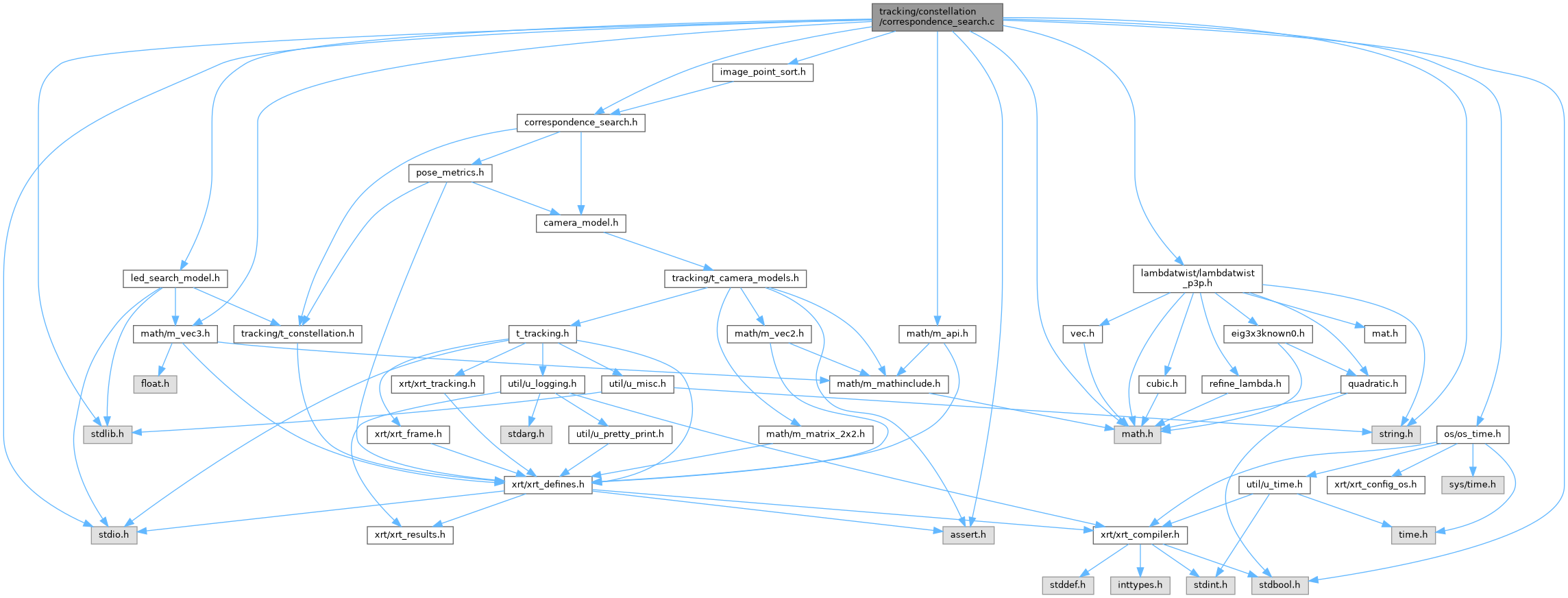
#include "math/m_api.h"#include "math/m_vec3.h"#include "os/os_time.h"#include "lambdatwist/lambdatwist_p3p.h"#include "correspondence_search.h"#include "led_search_model.h"#include "image_point_sort.h"#include <stdlib.h>#include <string.h>#include <stdio.h>#include <stdbool.h>#include <assert.h>#include <math.h>
Include dependency graph for correspondence_search.c:
Macros | |
| #define | CS_TRACE(cs, ...) U_LOG_IFL_T((*((cs)->ct_log_level)), __VA_ARGS__) |
| #define | CS_DEBUG(cs, ...) U_LOG_IFL_D((*((cs)->ct_log_level)), __VA_ARGS__) |
| #define | CS_INFO(cs, ...) U_LOG_IFL_I((*((cs)->ct_log_level)), __VA_ARGS__) |
| #define | CS_WARN(cs, ...) U_LOG_IFL_W((*((cs)->ct_log_level)), __VA_ARGS__) |
| #define | CS_ERROR(cs, ...) U_LOG_IFL_E((*((cs)->ct_log_level)), __VA_ARGS__) |
| #define | DUMP_SCENE 0 |
| #define | DUMP_BLOBS 0 |
| #define | DUMP_FULL_DEBUG 0 |
| #define | DUMP_FULL_LOG 0 |
| #define | DUMP_TIMING 0 |
| #define | CHECK_ALL_PROJECTIONS 0 |
| #define | CS_DUMP_BLOBS(cs, ...) |
| #define | CS_FULL_DEBUG(cs, ...) |
| #define | CS_FULL_LOG(cs, ...) |
| #define | CS_TIMING(cs, ...) |
| #define | MAX_LED_SEARCH_DEPTH 8 |
Functions | |
| static void | undistort_blob_points (struct t_blob *blobs, int num_blobs, struct xrt_vec2 *out_points, struct camera_model *calib) |
| static void | dump_pose (struct correspondence_search *cs, struct t_constellation_search_model *model, struct xrt_pose *pose, struct cs_model_info *mi) |
| static bool | correspondence_search_project_pose (struct correspondence_search *cs, struct t_constellation_search_model *model, struct xrt_pose *pose, struct cs_model_info *mi, int depth) |
| static void | quat_from_rotation_matrix (struct xrt_quat *me, double R[9]) |
| static void | check_led_against_model_subset (struct correspondence_search *cs, struct cs_model_info *mi, struct cs_image_point **blobs, struct t_constellation_tracker_led *model_leds[4], int depth) |
| static void | select_k_blobs_from_n (struct correspondence_search *cs, struct cs_model_info *mi, struct t_constellation_tracker_led **model_leds, struct cs_image_point **result_list, struct cs_image_point **output_list, struct cs_image_point **candidate_list, int k, int n, int depth) |
| Select k entries from the n provided in candidate_list into output_list, then call check_led_match() with the result_list. | |
| static void | check_leds_against_anchor (struct correspondence_search *cs, struct cs_model_info *mi, struct t_constellation_tracker_led **model_leds, struct cs_image_point *anchor) |
| static void | check_led_match (struct correspondence_search *cs, struct cs_model_info *mi, struct t_constellation_tracker_led **model_leds, int depth) |
| static void | select_k_leds_from_n (struct correspondence_search *cs, struct cs_model_info *mi, struct t_constellation_tracker_led **result_list, struct t_constellation_tracker_led **output_list, struct t_constellation_tracker_led **candidate_list, int k, int n, int depth) |
| static void | generate_led_match_candidates (struct correspondence_search *cs, struct cs_model_info *mi, struct t_constellation_search_led_candidate *c) |
| static bool | search_pose_for_model (struct correspondence_search *cs, struct cs_model_info *mi) |
| struct correspondence_search * | correspondence_search_new (const enum u_logging_level *ct_log_level, struct camera_model *camera_calib) |
| void | correspondence_search_free (struct correspondence_search *cs) |
| void | correspondence_search_set_blobs (struct correspondence_search *cs, struct t_blob *blobs, int num_blobs) |
| bool | correspondence_search_find_one_pose (struct correspondence_search *cs, struct t_constellation_search_model *model, enum correspondence_search_flags search_flags, struct xrt_pose *pose, struct xrt_vec3 *pos_error_thresh, struct xrt_vec3 *rot_error_thresh, struct xrt_vec3 *gravity_vector, float gravity_tolerance_rad, struct pose_metrics *score) |
Detailed Description
Ab-initio blob<->LED correspondence search.
Function Documentation
◆ select_k_blobs_from_n()
|
static |
Select k entries from the n provided in candidate_list into output_list, then call check_led_match() with the result_list.
References CS_FLAG_STOP_FOR_STRONG_MATCH, POSE_MATCH_STRONG, and select_k_blobs_from_n().
Referenced by select_k_blobs_from_n().